四足机器人开发之二(开发环境篇)
本文最后更新于 2024-10-18,文章内容距离上一次更新已经过去了很久啦,可能已经过时了,请谨慎参考喵。
title: 四足机器人开发之二(开发环境篇)
top_img: false
tags:
- 物联网
- 四足机器人
- ESP8266
categories:
- 嵌入式开发
abbrlink: b72112f1
date: 2023-07-11 20:15:46
cover: '/upload/cdn4files/202307112055403.png'
copyright:
comments:
续前言
请看:四足机器人开发之一(食材篇) (链接已失效,可在本站内搜索标题)
Arduino IDE下载
esp8266的开发方式有多种:可以使用C/C++语言进行开发,使用的开发环境为Arduino
可也可以使用Micropython,开发环境为Pycharm
本篇文章介绍如何使用Arduino+ C/C++ 语言开发esp8266应用
Arduino官网:https://www.arduino.cc/
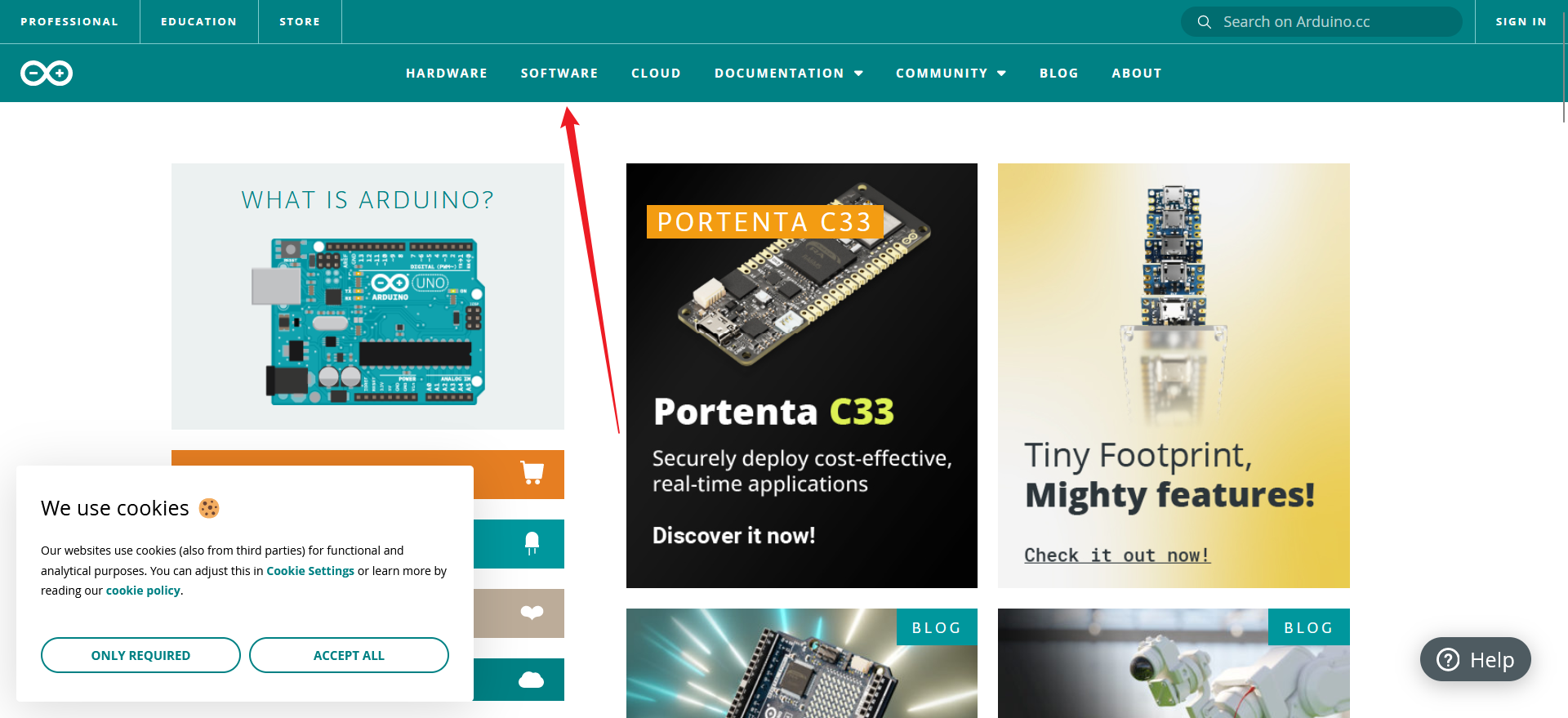
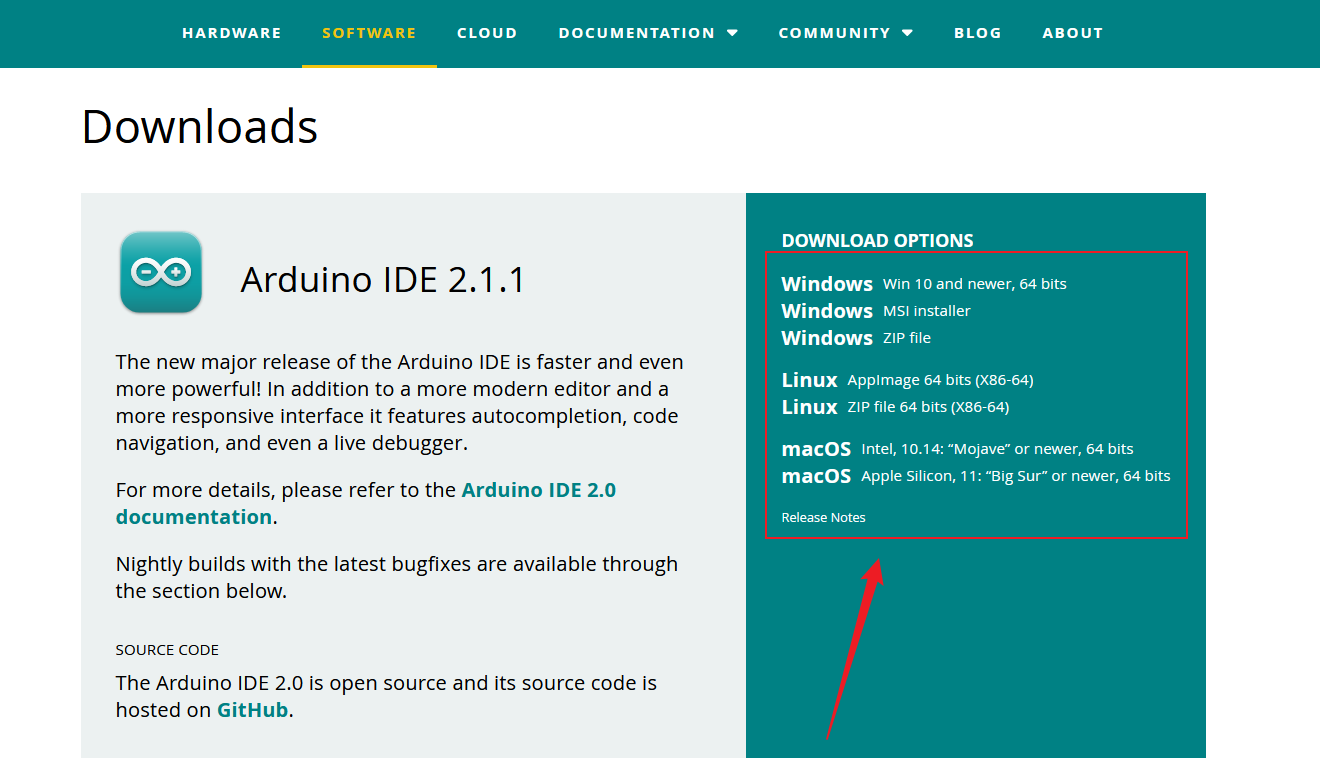
根据自己的需要去下载对应的版本
下载完成之后直接安装即可
切换语言
安装好Arduino IDE打开之后是英文,不过有中文可以切换
我已经切换好了中文,但是步骤是一样的
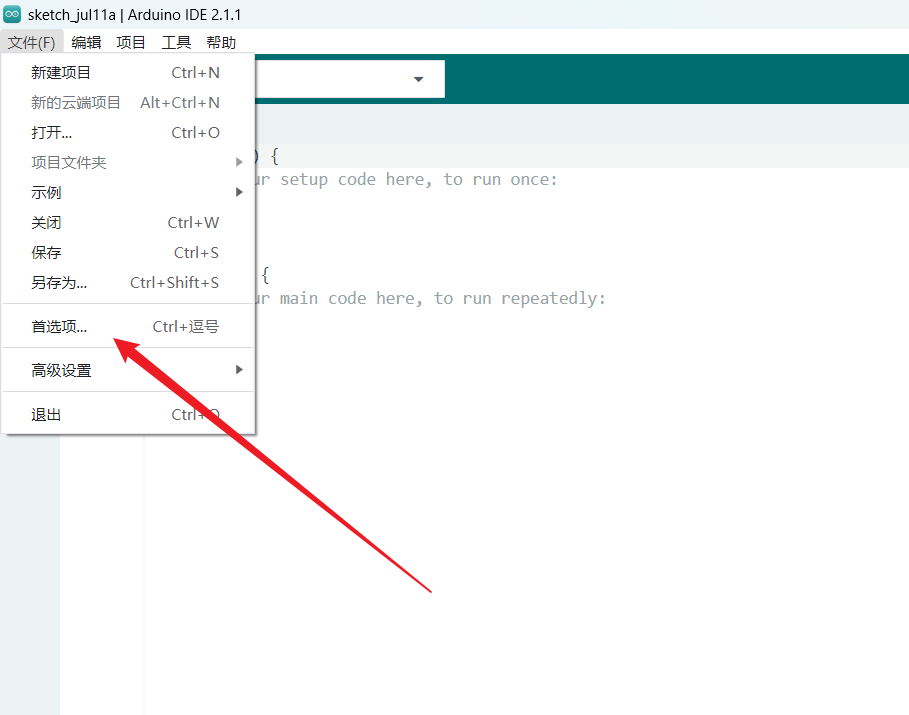
打开左上角首选项
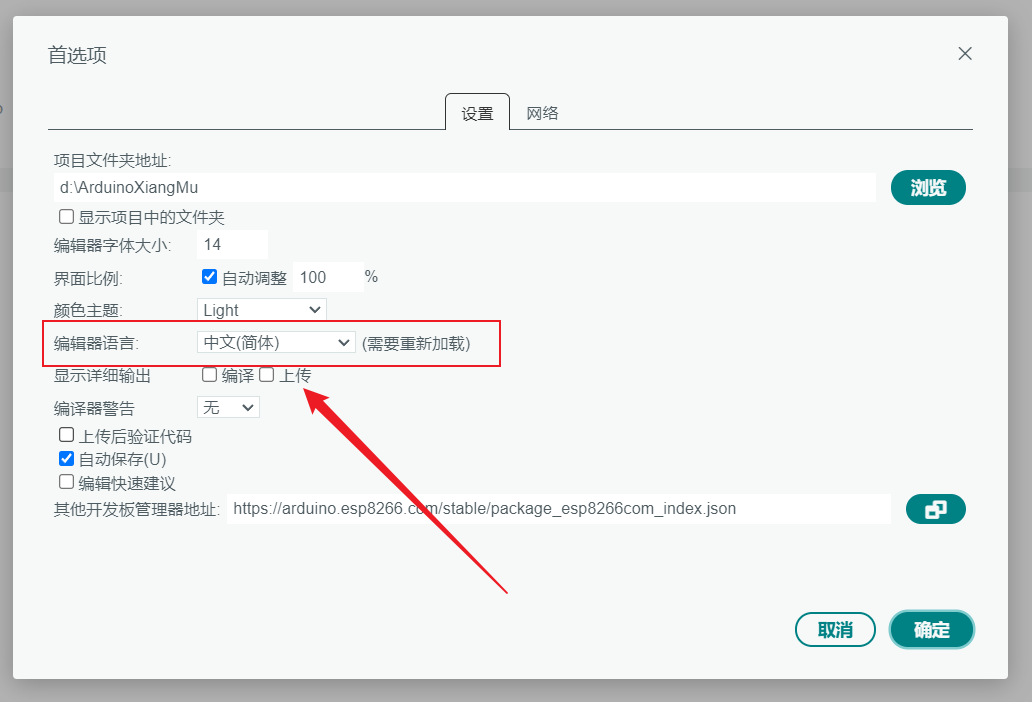
点击确定之后即可
安装ESP8266开发板
打开首选项,在 其他开发板管理器地址 的地方输入:https://arduino.esp8266.com/stable/package_esp8266com_index.json
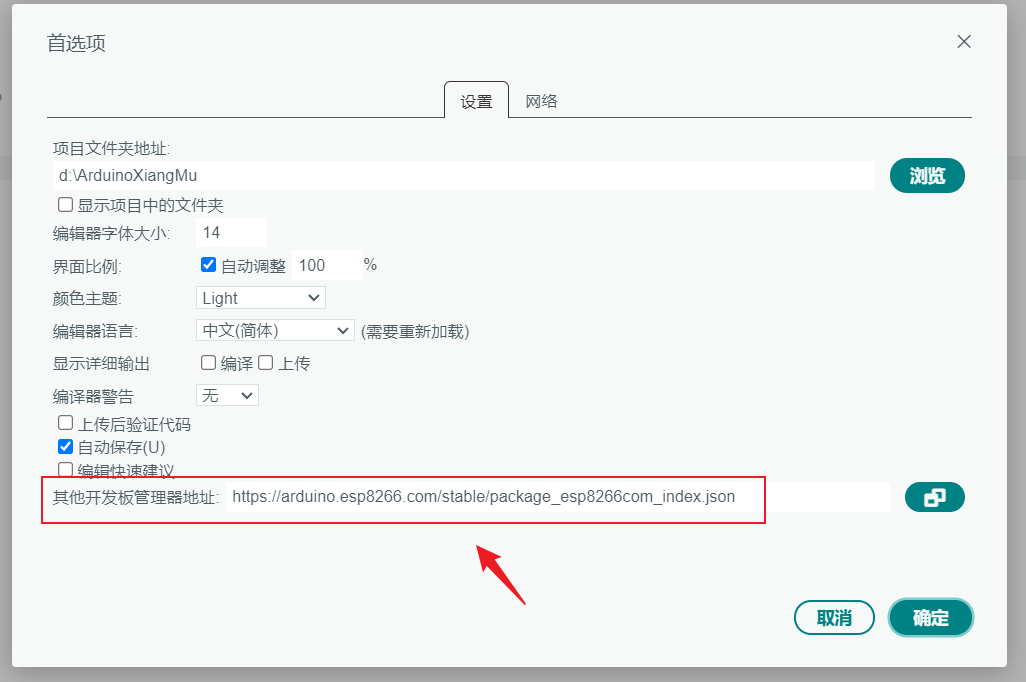
输入完毕之后点击确定,就会自动下载对应的ESP8266包信息
如果下载失败请切换网络,或者科学上网
打开开发板管理器,搜索ESP8266
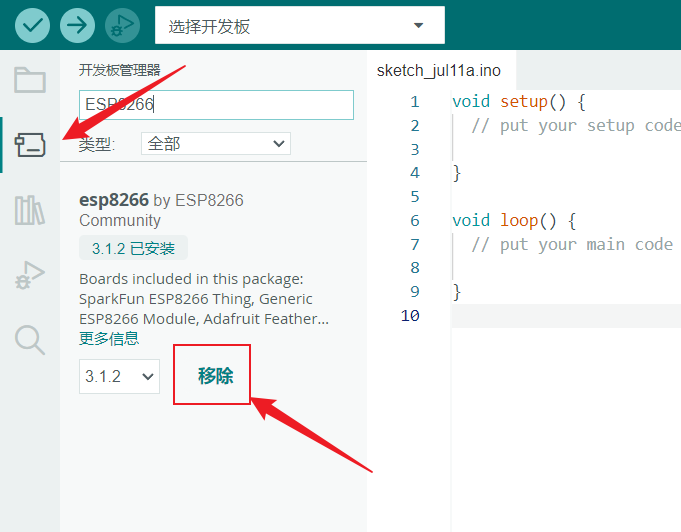
我这是已经安装好了,如果没有安装的话,这里显示的就是安装
注意:可能大概率情况下是安装失败,就是网络问题,需要科学上网
如果科学上网之后还是失败,直接手动从Github下载对应的包,然后不要解压
直接将下载好的压缩包放在下面这个位置:
C:\Users\用户名\AppData\Local\Arduino15\staging\packages然后重启Arduino,搜索ESP8266,点击安装,秒安装成功
需要注意的是,手动下载包时并不是一个,应该是好几个
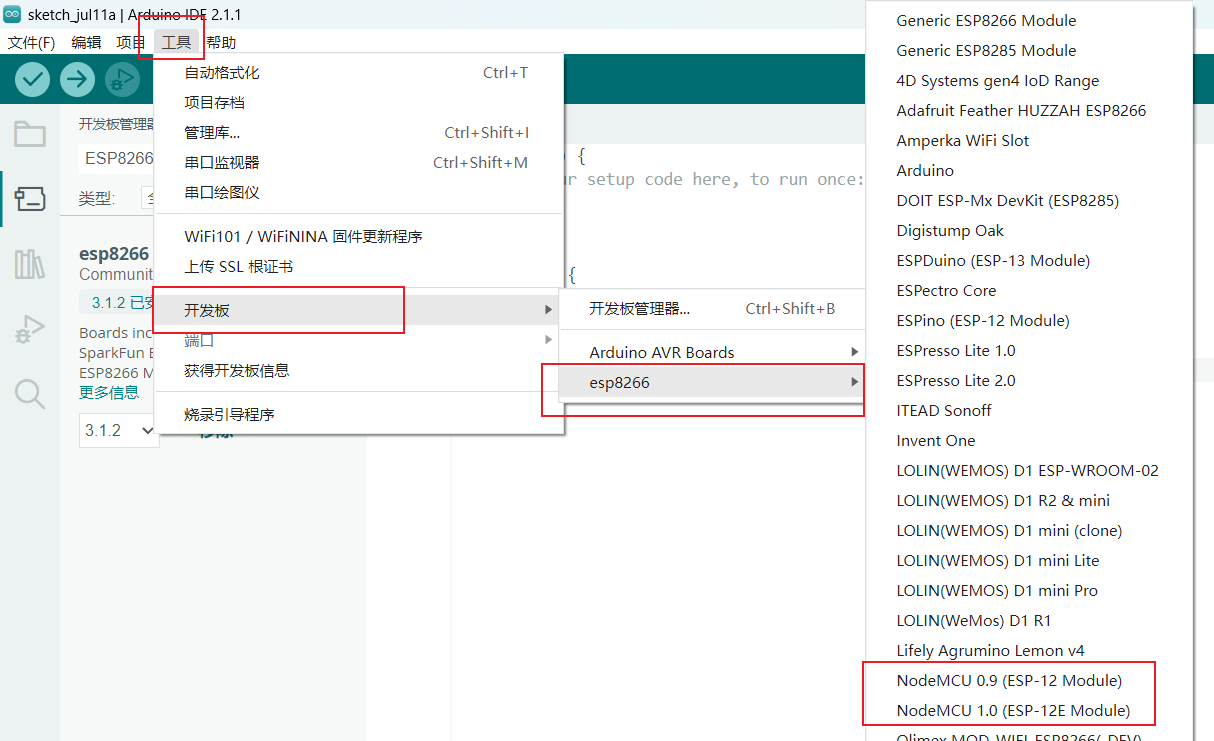
安装完成之后就可以在工具-开发板里看到ESP8266NodeMCU了:
调试开发板
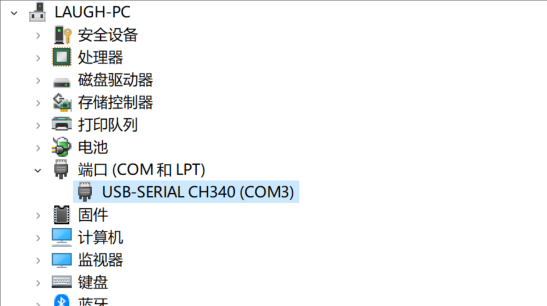
购买开发板的时候应该板子上都已经自带串口驱动了,一般是CP2102或者CH340
拿到板子之后,打开Arduino,用数据线连接板子
是可以在设备管理器里看到板子的驱动的:
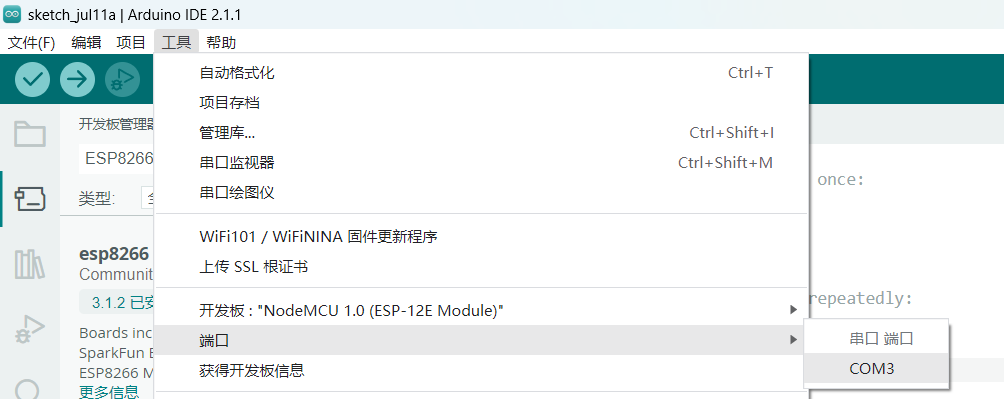
在Arduino里选择开发板:
和上面一样,选择好对应自己板子的版本:
我的是1.0,我就选择1.0
端口选择COM3:
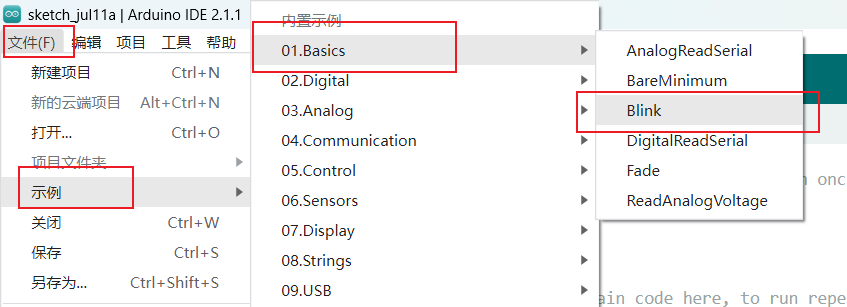
然后就可以选择示例程序测试板子是否正常
打开Blink示例:
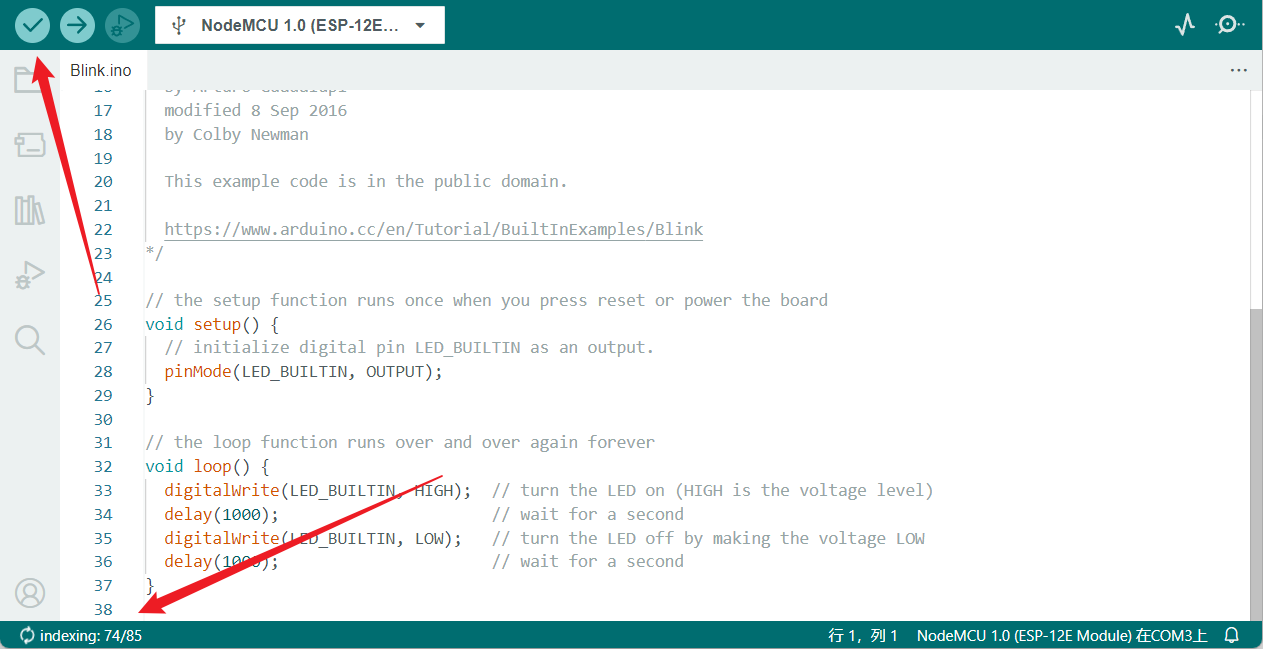
等待左下角index加载完毕之后,点击编译
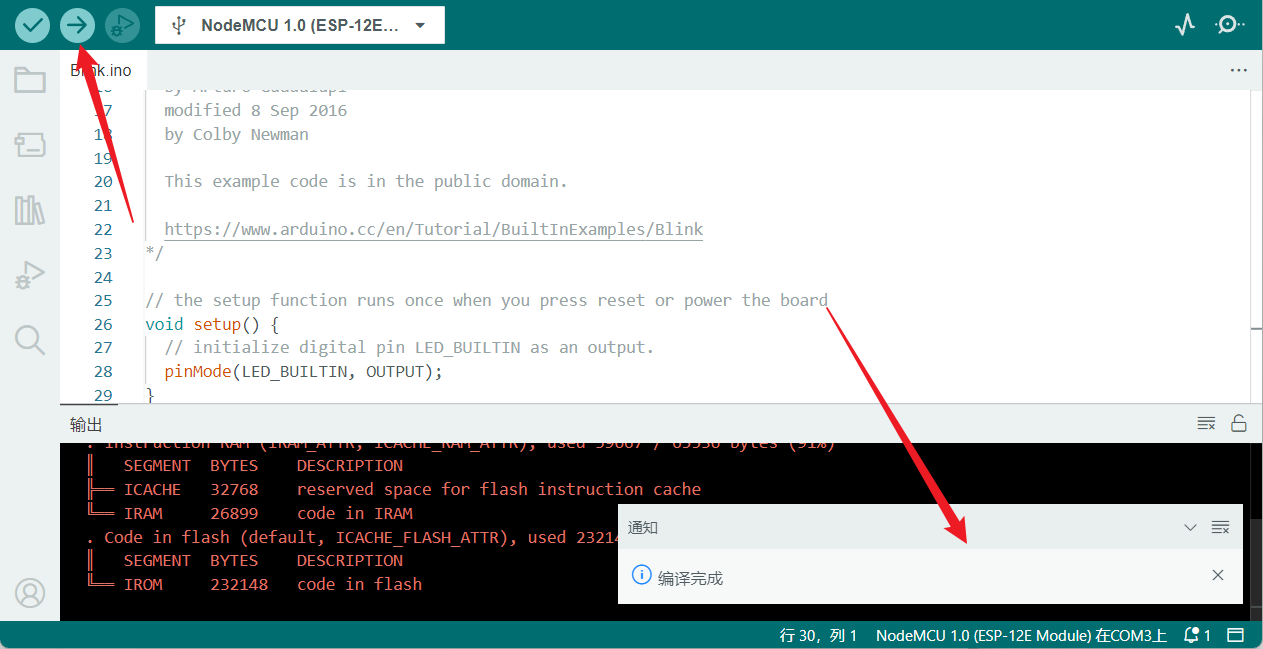
等待编译完成,点击上传,等待上传完毕之后就可以看到自己的板子上LED灯在稳定的闪烁,频率为1秒一次
注意,是稳定的闪烁,如果闪烁不稳定,或者亮光微小,闪烁频繁,说明程序正在上传,请不要断开链接
这样就完成了开发板的调试和前期的准备工作啦
请期待下一篇~
写给纯小白的话
我遇到的两个小问题
第一:ESP8266使用Arduino写入程序的方式是覆盖式写入,当第一个程序写入完毕之后,第二次再写入不同的程序,那么第一个就会被覆盖掉清除掉
第二:当程序写入完毕之后,就可以直接拔了板子了,对,没错,直接拔