四足机器人开发之三(原理篇)
本文最后更新于 2024-10-18,文章内容距离上一次更新已经过去了很久啦,可能已经过时了,请谨慎参考喵。
title: 四足机器人开发之三(原理篇)
top_img: false
tags:
- 物联网
- 四足机器人
- ESP8266
categories:
- 嵌入式开发
abbrlink: e920e948
date: 2023-07-11 20:55:44
cover: '/upload/cdn4files/202307112059894.png'
copyright:
comments:
续前言
四足机器人开发之一(食材篇) (链接已失效,可在本站内搜索标题)
四足机器人开发之二(开发环境篇)(链接已失效,可在本站内搜索标题)
原理
参考文献:60元成本打造esp8266四足机器人
PWM
因为使用了pca9685舵机驱动板,所以这里使用的是Adafruit_PWMServoDriver库驱动sg90舵机,原理是通过PWM来控制舵机角度,动作主要是靠PWM来写的
舵机0-180度对应的PWM数值写在表格里了,这里取的是近似值,自己进行微调也可以
| 角度 | PWM数值 |
|---|---|
| 0 | 100 |
| 45 | 190 |
| 90 | 280 |
| 135 | 370 |
| 180 | 510 |
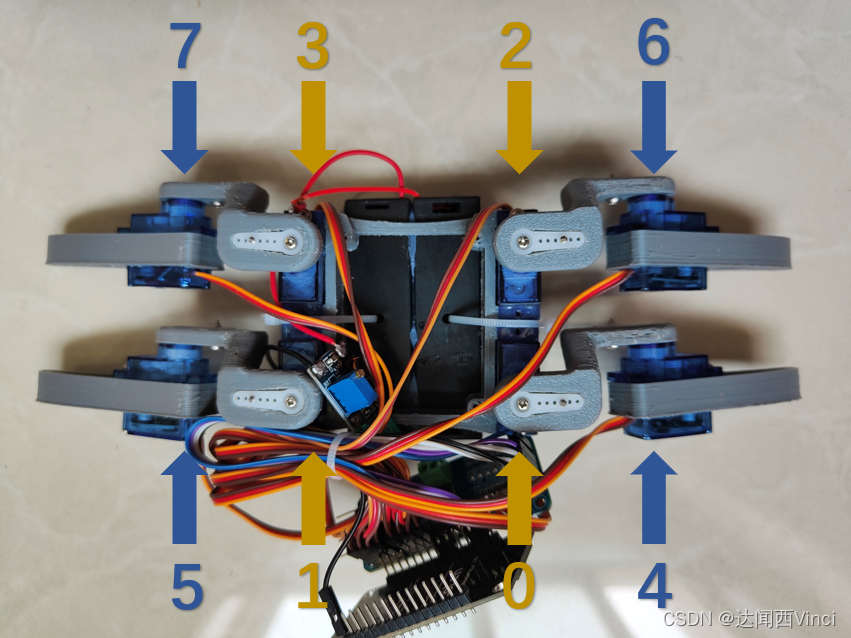
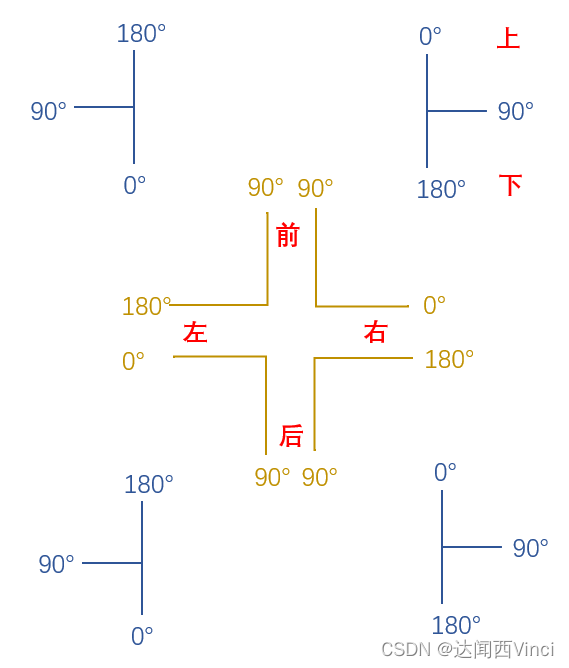
舵机号
图中的舵机号与代码中的舵机号是对应的,比如代码中的 pwm.setPWM(4, 0, 370) ,就是将4号脚置于135度
舵机角度
蓝色角度对应的是4、5、6、7脚,黄色对应的是0、1、2、3脚
这里的角度范围表示舵机能运动的范围以及最大角度
比如当4、6号脚为0度时向上,而5、7脚0度时向下,反之当4、6号脚为180度时向下,而5、7脚180度时向上
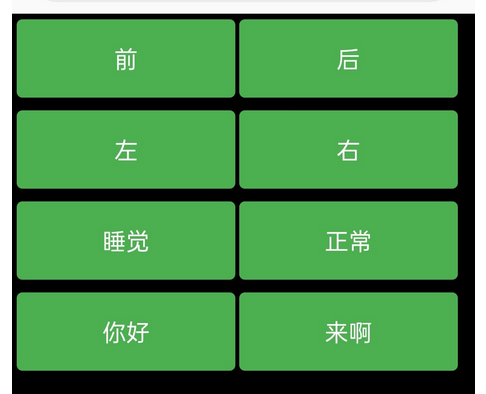
操作界面
操作页面有用小程序的也有用软件的,这里使用的是网页
用esp8266作为网络服务器,按钮使用html写的
原理就这么简单,期待最后的组装篇~
代码
#include <ESP8266WiFi.h>
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
const char* ssid = "WIFI名称";
const char* password = "WIFI密码";
WiFiServer server(80); //http的服务端口
void setup() {
pinMode(16, OUTPUT); //用于连接Wi-Fi的LED指示灯
digitalWrite(16, LOW);
Serial.begin(115200);
pwm.begin();
pwm.setPWMFreq(60); //伺服电机以60hz刷新率工作
delay(1000);
//连接到无线网络
Serial.println();
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print("-");
}
Serial.println("");
Serial.println("WiFi connected");
//启动服务器
server.begin();
Serial.println("Server started");
//打印IP地址
Serial.print("Use this URL to connect: ");
Serial.print("http://");
Serial.print(WiFi.localIP());
Serial.println("/");
digitalWrite(16, HIGH);
}
void loop() {
//检查客户端是否已连接
WiFiClient client = server.available();
if (!client) {
return;
}
//等到客户端发送一些数据
Serial.println("new client");
while (!client.available()) {
delay(1);
}
//阅读请求的第一行
String request = client.readStringUntil('\r');
Serial.println(request);
client.flush();
//匹配请求
if (request.indexOf("/S") != -1) {
sleep();
}
if (request.indexOf("/W") != -1) {
normal();
}
if (request.indexOf("/F") != -1) {
normal();
forward();
forward();
forward();
forward();
}
if (request.indexOf("/B") != -1) {
normal();
backward();
backward();
backward();
backward();
}
if (request.indexOf("/L") != -1) {
normal();
left();
left();
}
if (request.indexOf("/R") != -1) {
normal();
right();
right();
}
if (request.indexOf("/H") != -1) {
normal();
hello();
}
if (request.indexOf("/C") != -1) {
normal();
come();
}
//返回响应
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println(""); // do not forget this one
client.println("<!DOCTYPE HTML>");
client.println("<html>");
client.println("<head>");
client.println("<style>");
client.println(".button{");
/*----------网页设计----------*/
client.println("background-color: #4CAF50; /* GREEN */");
client.println("width: 48%;");
client.println("border: none;");
client.println("color: white;");
client.println("padding: 50px 40px;");
client.println("text-align: center;");
client.println("text-decoration: none;");
client.println("display: inline-block;");
client.println("font-size: 50px;");
client.println("margin: 4px 2px;");
client.println("cursor: pointer;");
client.println("border-radius: 12px;");
client.println("}");
client.println("</style>");
client.println("</head>");
client.println("<body bgcolor=black>");
client.println("<button class=\"button\" onclick=\"window.location.href='/F';\">前进</button>");
client.println("<button class=\"button\" onclick=\"window.location.href='/B';\">后退</button>");
client.println("<br></br>");
client.println("<button class=\"button\" onclick=\"window.location.href='/L';\">左转</button>");
client.println("<button class=\"button\" onclick=\"window.location.href='/R';\">右转</button>");
client.println("<br></br>");
client.println("<button class=\"button\" onclick=\"window.location.href='/S';\">睡觉</button>");
client.println("<button class=\"button\" onclick=\"window.location.href='/W';\">正常</button>");
client.println("<br></br>");
client.println("<button class=\"button\" onclick=\"window.location.href='/H';\">你好</button>");
client.println("<button class=\"button\" onclick=\"window.location.href='/C';\">来啊</button>");
client.println("</body>");
client.println("</html>");
delay(1);
Serial.println("Client disconnected");
Serial.println("");
}
/*----------动作函数----------*/
// | 7 | | 6 |
// ----- ----- ----- -----
// | 3 | | 2 |
// ----- -----
// | 1 | | 0 |
// ----- ----- ----- -----
// | 5 | | 4 |
void sleep()
{
pwm.setPWM(4, 0, 280);
delay(100);
pwm.setPWM(5, 0, 280);
delay(100);
pwm.setPWM(6, 0, 280);
delay(100);
pwm.setPWM(7, 0, 280);
delay(100);
pwm.setPWM(0, 0, 510);
delay(100);
pwm.setPWM(1, 0, 100);
delay(100);
pwm.setPWM(2, 0, 100);
delay(100);
pwm.setPWM(3, 0, 510);
}
void normal()
{
pwm.setPWM(0, 0, 370);
delay(100);
pwm.setPWM(1, 0, 190);
delay(100);
pwm.setPWM(2, 0, 190);
delay(100);
pwm.setPWM(3, 0, 370);
delay(100);
pwm.setPWM(4, 0, 510);
delay(100);
pwm.setPWM(7, 0, 100);
delay(100);
pwm.setPWM(6, 0, 510);
delay(100);
pwm.setPWM(5, 0, 100);
}
void left()
{
pwm.setPWM(4, 0, 370);
delay(100);
pwm.setPWM(0, 0, 510);
delay(100);
pwm.setPWM(4, 0, 510);
delay(100);
pwm.setPWM(6, 0, 370);
delay(100);
pwm.setPWM(2, 0, 280);
delay(100);
pwm.setPWM(6, 0, 510);
delay(100);
pwm.setPWM(7, 0, 190);
delay(100);
pwm.setPWM(3, 0, 510);
delay(100);
pwm.setPWM(7, 0, 100);
delay(100);
pwm.setPWM(5, 0, 190);
delay(100);
pwm.setPWM(1, 0, 280);
delay(100);
pwm.setPWM(5, 0, 100);
delay(100);
pwm.setPWM(0, 0, 370);
pwm.setPWM(2, 0, 190);
pwm.setPWM(3, 0, 370);
pwm.setPWM(1, 0, 190);
}
void right()
{
pwm.setPWM(5, 0, 190);
delay(100);
pwm.setPWM(1, 0, 100);
delay(100);
pwm.setPWM(5, 0, 100);
delay(100);
pwm.setPWM(7, 0, 190);
delay(100);
pwm.setPWM(3, 0, 280);
delay(100);
pwm.setPWM(7, 0, 100);
delay(100);
pwm.setPWM(6, 0, 370);
delay(100);
pwm.setPWM(2, 0, 100);
delay(100);
pwm.setPWM(6, 0, 510);
delay(100);
pwm.setPWM(4, 0, 370);
delay(100);
pwm.setPWM(0, 0, 190);
delay(100);
pwm.setPWM(4, 0, 510);
delay(100);
pwm.setPWM(1, 0, 190);
pwm.setPWM(3, 0, 370);
pwm.setPWM(2, 0, 190);
pwm.setPWM(0, 0, 370);
}
void forward()
{
pwm.setPWM(5, 0, 190);
delay(50);
pwm.setPWM(1, 0, 100);
delay(50);
pwm.setPWM(5, 0, 100);
delay(50);
pwm.setPWM(4, 0, 370);
delay(50);
pwm.setPWM(0, 0, 510);
delay(50);
pwm.setPWM(4, 0, 510);
delay(50);
pwm.setPWM(6, 0, 370);
delay(50);
pwm.setPWM(2, 0, 280);
delay(50);
pwm.setPWM(6, 0, 510);
delay(50);
pwm.setPWM(7, 0, 190);
delay(50);
pwm.setPWM(3, 0, 280);
delay(50);
pwm.setPWM(7, 0, 100);
delay(50);
pwm.setPWM(0, 0, 370);
pwm.setPWM(1, 0, 190);
pwm.setPWM(2, 0, 190);
pwm.setPWM(3, 0, 370);
}
void backward()
{
pwm.setPWM(7, 0, 190);
delay(50);
pwm.setPWM(3, 0, 510);
delay(50);
pwm.setPWM(7, 0, 100);
delay(50);
pwm.setPWM(6, 0, 370);
delay(50);
pwm.setPWM(2, 0, 100);
delay(50);
pwm.setPWM(6, 0, 510);
delay(50);
pwm.setPWM(5, 0, 190);
delay(50);
pwm.setPWM(1, 0, 280);
delay(50);
pwm.setPWM(5, 0, 100);
delay(50);
pwm.setPWM(4, 0, 370);
delay(50);
pwm.setPWM(0, 0, 280);
delay(50);
pwm.setPWM(4, 0, 510);
delay(50);
pwm.setPWM(3, 0, 370);
pwm.setPWM(2, 0, 190);
pwm.setPWM(1, 0, 190);
pwm.setPWM(0, 0, 370);
}
void hello()
{
pwm.setPWM(0, 0, 510);
delay(100);
pwm.setPWM(4, 0, 100);
delay(500);
pwm.setPWM(4, 0, 190);
delay(500);
pwm.setPWM(4, 0, 100);
delay(500);
pwm.setPWM(4, 0, 190);
delay(500);
pwm.setPWM(4, 0, 100);
delay(500);
pwm.setPWM(4, 0, 510);
}
void come()
{
pwm.setPWM(0, 0, 280);
delay(100);
pwm.setPWM(4, 0, 100);
delay(500);
pwm.setPWM(4, 0, 190);
delay(500);
pwm.setPWM(4, 0, 100);
delay(500);
pwm.setPWM(4, 0, 190);
delay(500);
pwm.setPWM(4, 0, 100);
delay(500);
pwm.setPWM(4, 0, 510);
}
评论
匿名评论
隐私政策
你无需删除空行,直接评论以获取最佳展示效果