四足机器人开发之一(食材篇)
本文最后更新于 2024-10-18,文章内容距离上一次更新已经过去了很久啦,可能已经过时了,请谨慎参考喵。
title: 四足机器人开发之一(食材篇)
top_img: false
tags:
- 物联网
- 四足机器人
- ESP8266
categories:
- 嵌入式开发
cover: '/upload/cdn4files/202307111931697.png'
abbrlink: f429c0a1
date: 2023-07-11 19:21:59
copyright:
comments:
前言
前几天刷B站的时候,无意中看到了这样一个四足机器人的视频,顿时来了兴趣,特别想自己做一个
但是我是纯小白,一点儿都没接触过嵌入式开发
还好有博主的详细教程,就自己准备折腾折腾
顺便记录一下这个折腾的过程
这里是原博主的视频链接:【用oled屏幕变化表情的四足机器人(・ω< )★ esp8266】
这里是参考大佬的博文:60元打造四足机器人
食材准备
因为没有经验,自己也不知道能不能成功,所以打算写个“连续剧”
本篇就是需要准备的东西,也就是材料准备
ESP8266
四足机器人(以下简称小可爱)的大脑就是ESP8266**(NodeMCU)**物联网模块,它长这样:

不必拘泥于哪个型号,只要是ESP8266都行,购买价格:

电池
电池推荐使用2节18650电池,当然也可以用其他电池代替,1节也ok,长这样:

顺带一提,最好充电仓和电池盒也要哦,购买价格:

电池盒(带正负极)随便找个店铺买就行
PCA9685
pca9685控制板是用来控制舵机的,建议使用16路PWM Servo舵机驱动板,它长这样:

购买价格:

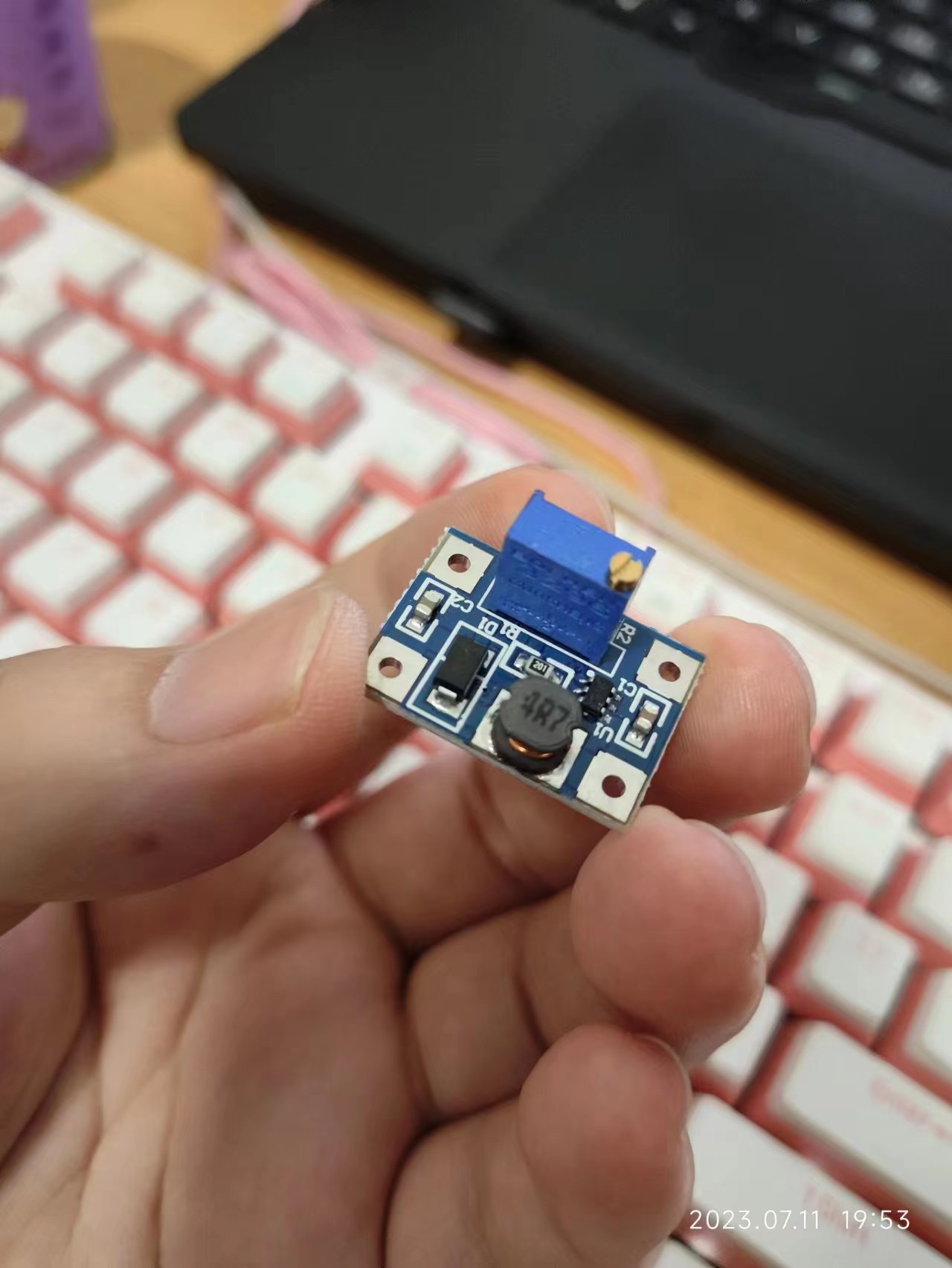
升压板
电源方案:两节18650并联后升压到5V,其实一节也可以
主要是将电池的3.7V升到5V,用来驱动舵机板
建议使用SX1308 2A DC-DC可调升压板
升压板长这样:
小提示,请记得买一点杜邦线用来焊接电源哦~
购买价格:

SG90舵机
舵机就是用来让小可爱动起来的东西啦
必须使用SG90 9g经典舵机,方向180度,只有180度的舵机才可以固定角度,360度的舵机只能控制方向和旋转速度
注意舵机数量要使用8个哦~
舵机长这样:

购买价格(8个一共的价格,还有上面的电池盒):

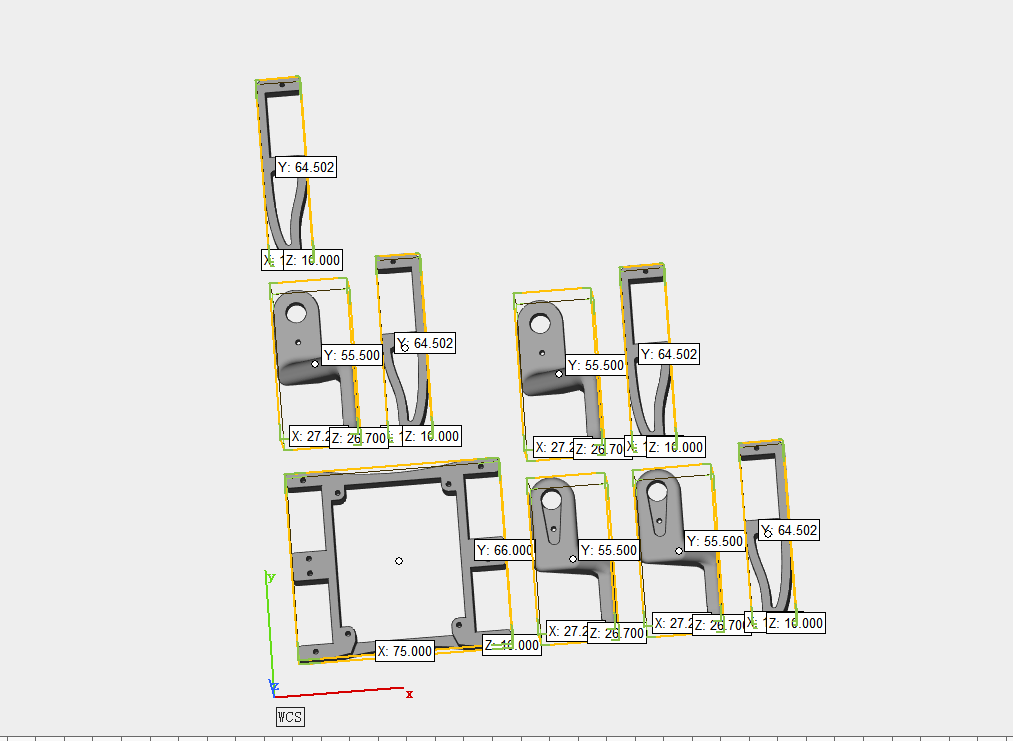
3D打印外壳
小可爱的外壳和四肢都是使用PLA耗材进行3D打印,身体打印一只,其余部件均打印两只
打印模型文件和本项目所有的代码文件可以按照原文链接去寻找,同时我也会放在我的GitHub里:四足机器人开发
特别注意:该3D打印的尺寸是某一种舵机的专用尺寸,我打印回来后发现与我买的舵机不对应,安装不上,所以请一定先购买舵机,然后根据你买的舵机对3D打印件的尺寸进行修正!!!
尺寸图:
至于3D打印,可以随便找闲鱼或者淘宝上的代打印服务,我不是很懂这个价格,所以应该是有点吃亏了,不过还好
实物图:
(暂时没实物图,明天到了我再补上)
补上实物图:

可以看到其实3D打印的细节处理的并不好,后续自己组装的时候可以进行微调,打磨等
打印服务+包邮价格:
食材就准备完毕啦~
敬请期待下一篇哦~
PS:别忘了买电烙铁,当然要是家里有就不用单独买啦
再来补充一条,记得买万用表,家里有的话就不用买
顺带一提,要是有轧带和杜邦线(母对母)就更好了
