四足机器人开发之四(组装篇)
本文最后更新于 2024-10-18,文章内容距离上一次更新已经过去了很久啦,可能已经过时了,请谨慎参考喵。
title: 四足机器人开发之四(组装篇)
top_img: false
tags:
- 物联网
- 四足机器人
- ESP8266
categories:
- 嵌入式开发
cover: '/upload/cdn4files/202307131833095.png'
abbrlink: 9597af26
date: 2023-07-13 18:30:03
copyright:
comments:
续前言
四足机器人开发之一(食材篇) (链接已失效,可在本站内搜索标题)
四足机器人开发之二(开发环境篇) (链接已失效,可在本站内搜索标题)
四足机器人开发之三(原理篇) (链接已失效,可在本站内搜索标题)
本篇就要开始正式的组装啦~
程序写入
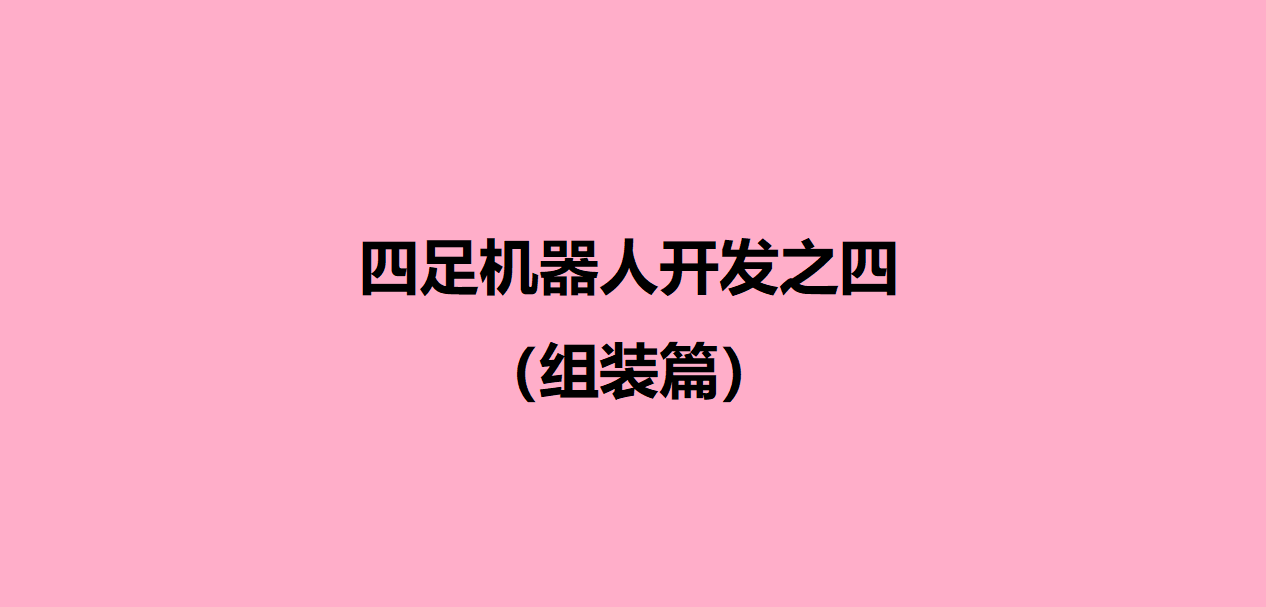
打开Arduino,复制原理篇中的代码进去
注:必须安装好开发环境篇中的几个驱动和库才可以!!!
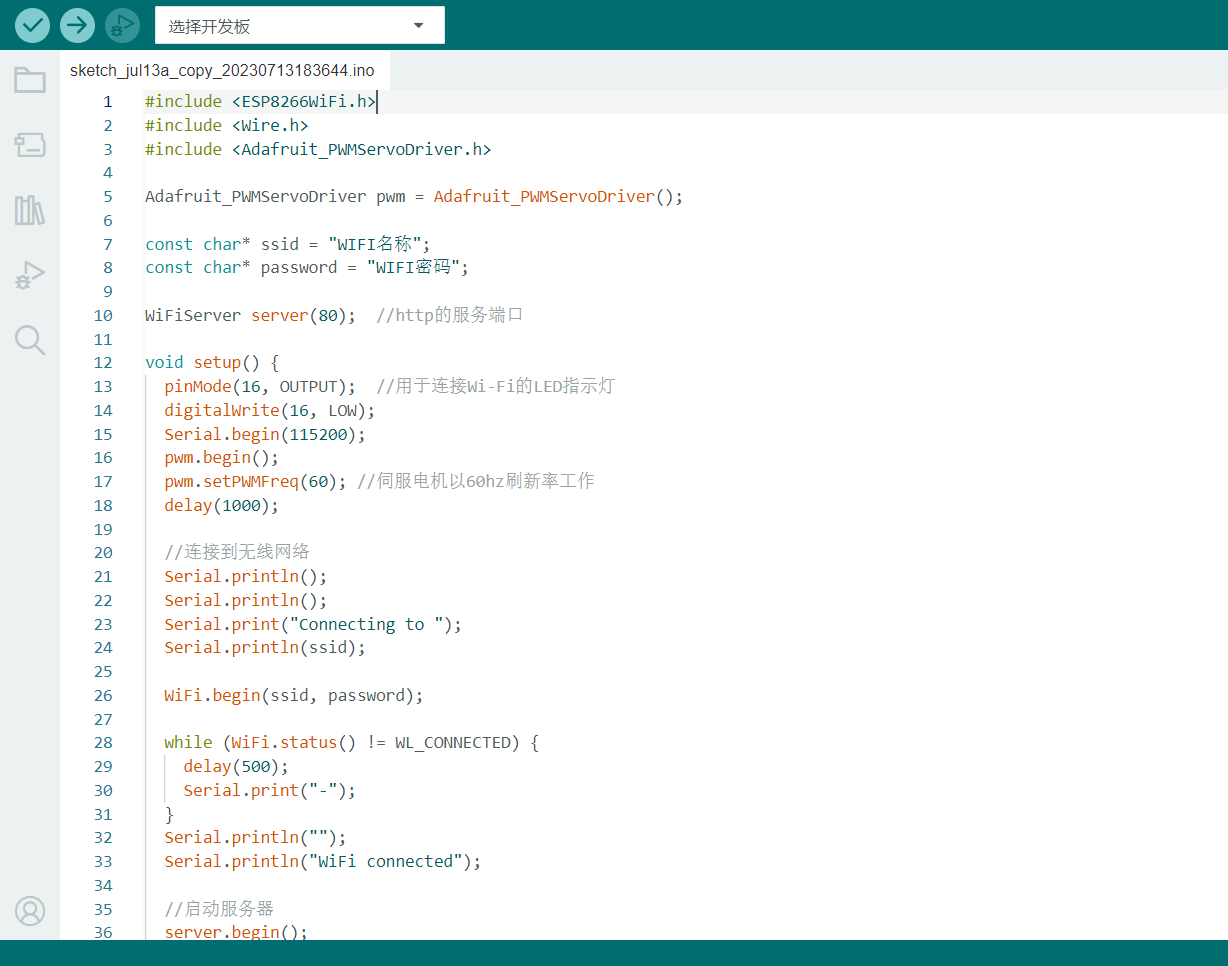
安装程序所需要的运行库: Adafruit PWM Servo Driver
将开发板要链接的WiFi名称和密码写入代码:

连接好开发板,在Arduino中选择好对应的开发板
然后按下图所示进行设置:
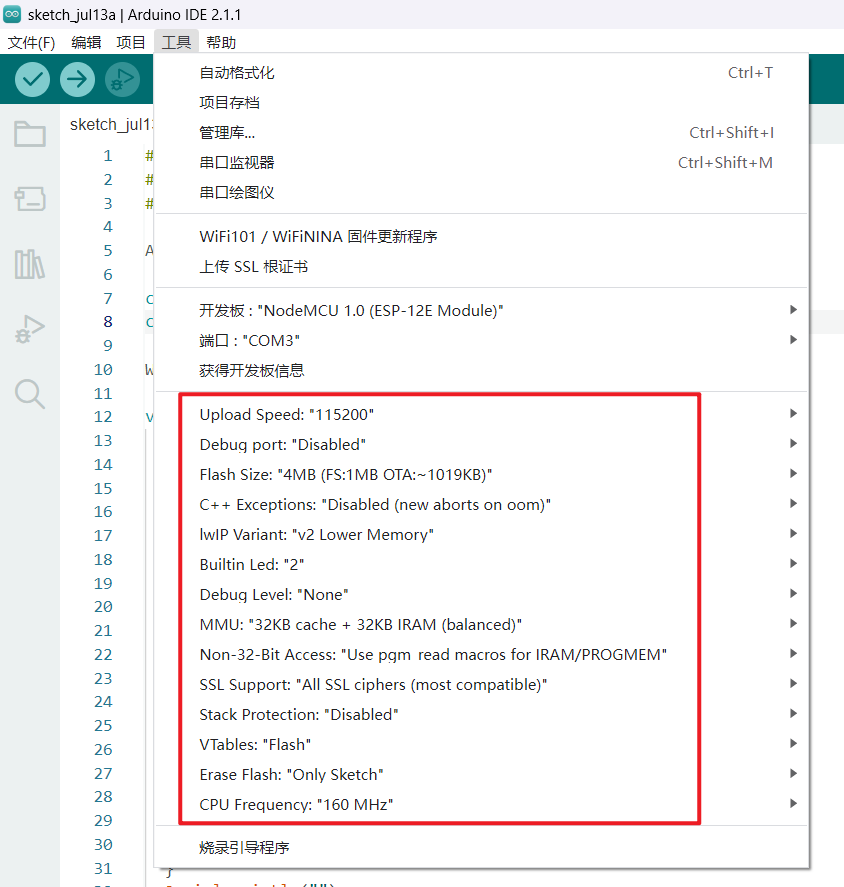
设置好之后,进行编译,编译完成之后选择上传
编译过程中,如果遇到这个报错:
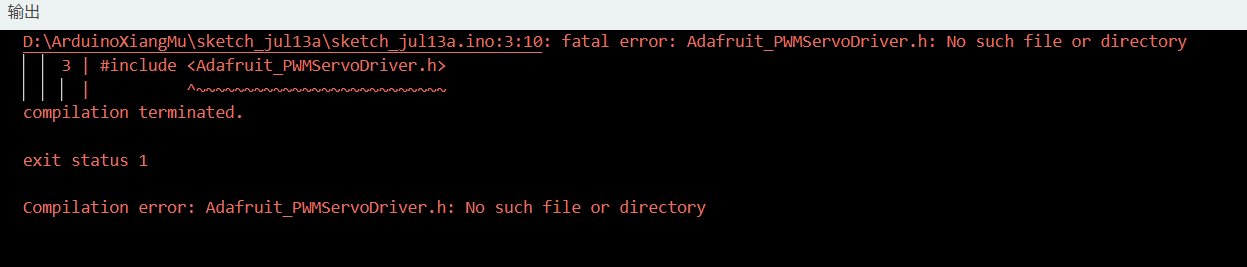
请检查你的 Adafruit PWM Servo Driver 库是否安装
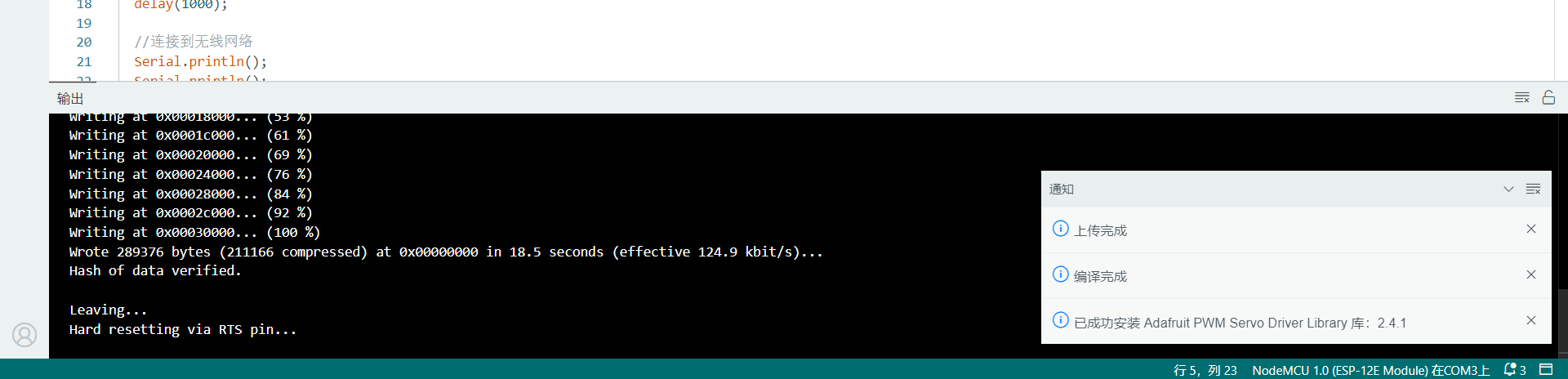
编译和上传完毕之后,打开工具-串口监视器,切换波特率为 115200 ,切换完毕之后
按一下板子上的reset键
就可以看到如图所示:

在同局域网下的浏览器中输入该地址(可能你的地址与我不同,输入自己的)
就可以进入网页端了:

注意:如果你的网页端汉字是乱码,那么是编码的问题,需要在代码中加入下面这一行:
client.println("<meta http-equiv='Content-Type' content='text/html;charset=utf-8'/>");

程序写入就完成了
供电连接
将电池连接到升压板输入端,升压板输出端连接舵机拓展板电源,这样就把电池的3.7V升到5V
注意正负极不要接反了,升压板使用前要先旋转几十圈再用,用万用表检测升压板输出电压是否达到5V
两节电池为并联
擦,忘了买万用表了,今天先更新到这,后面继续安装~
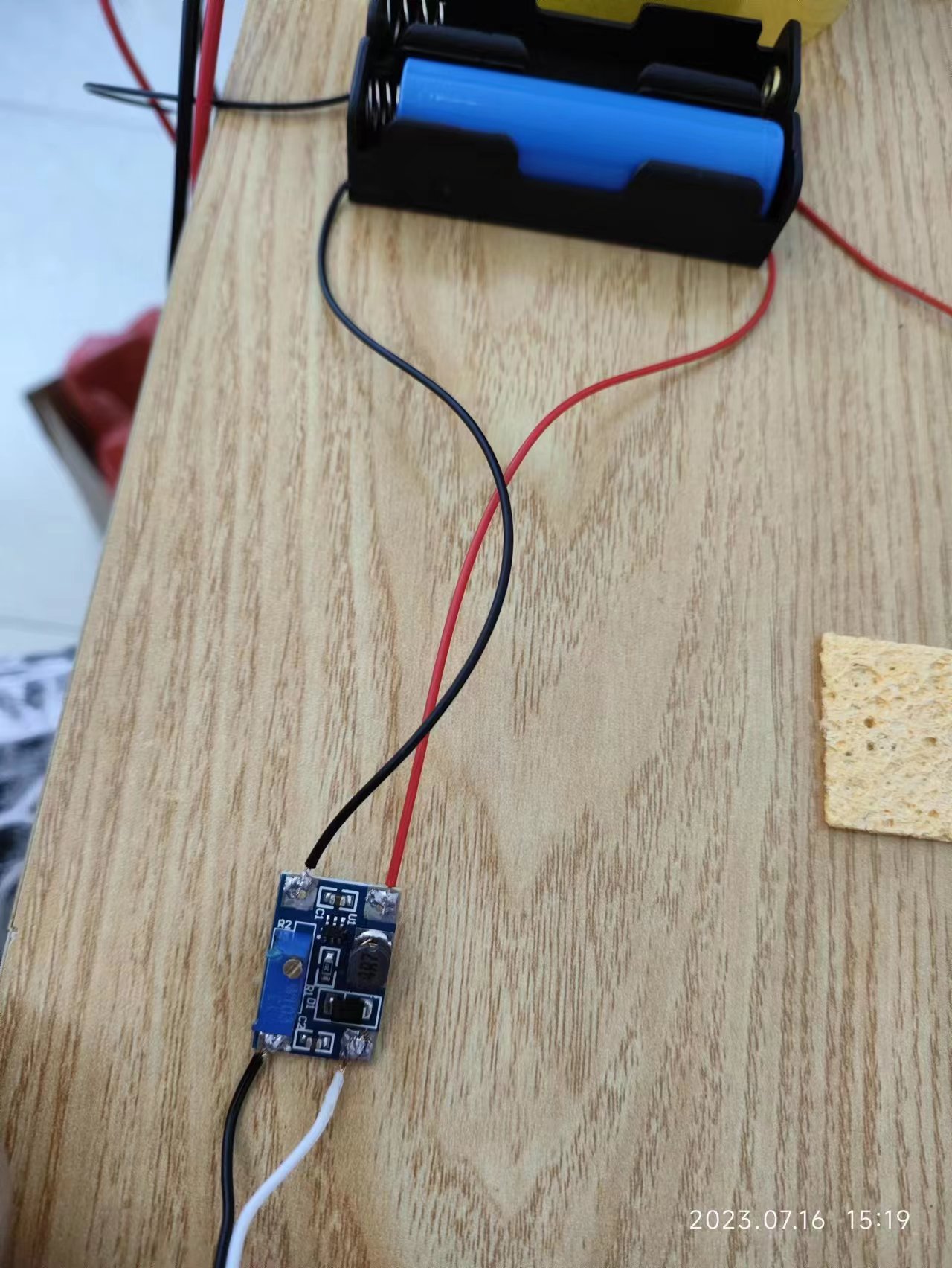
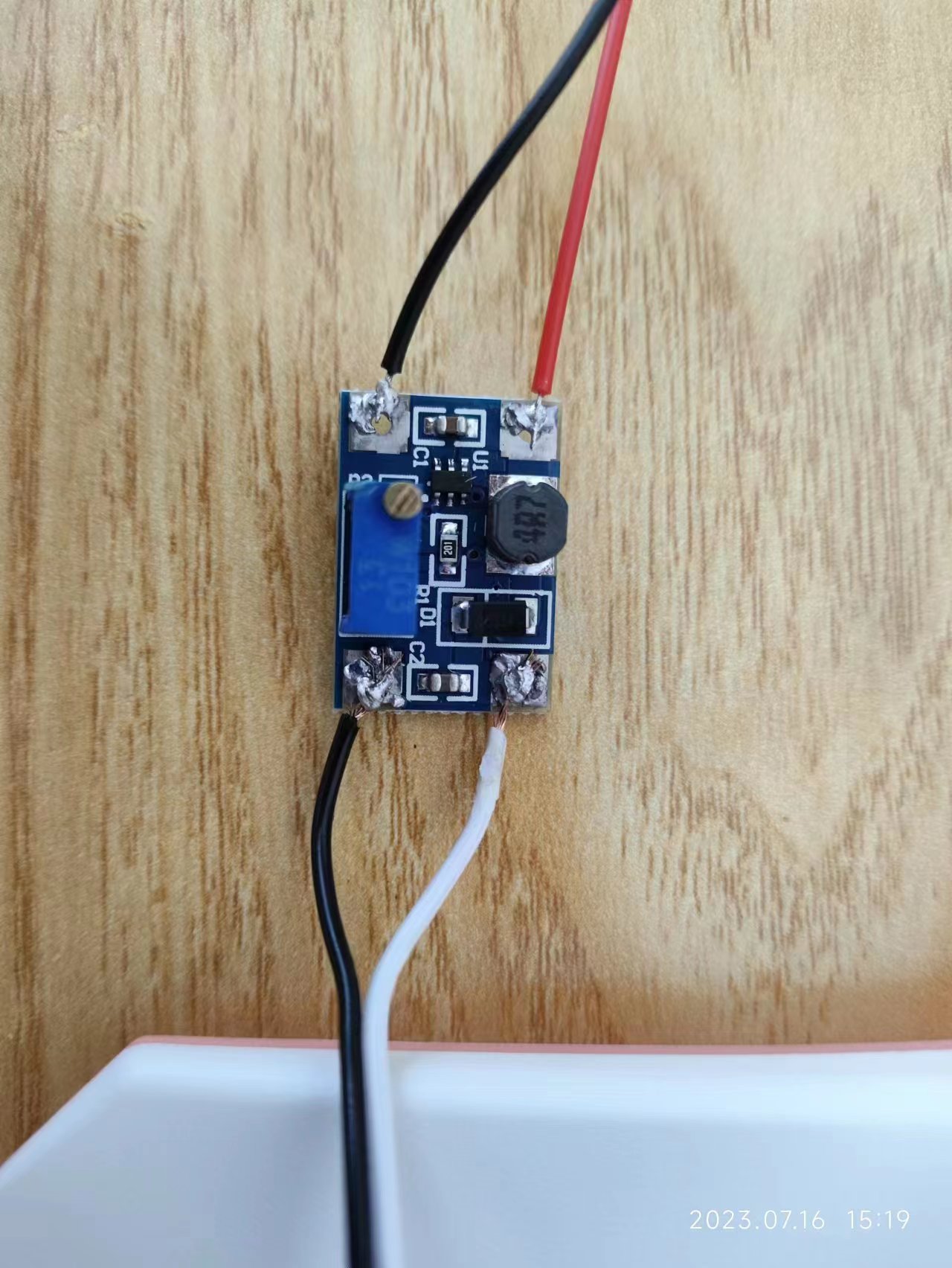
如图所示连接升压板和电池
注意正负极和升压板的输入输出端不要接反了!!!
PS:忽略我拙略的焊工,这破电烙铁实在是不给力
可以加电池看一下电池的电压:(也就是输入端)
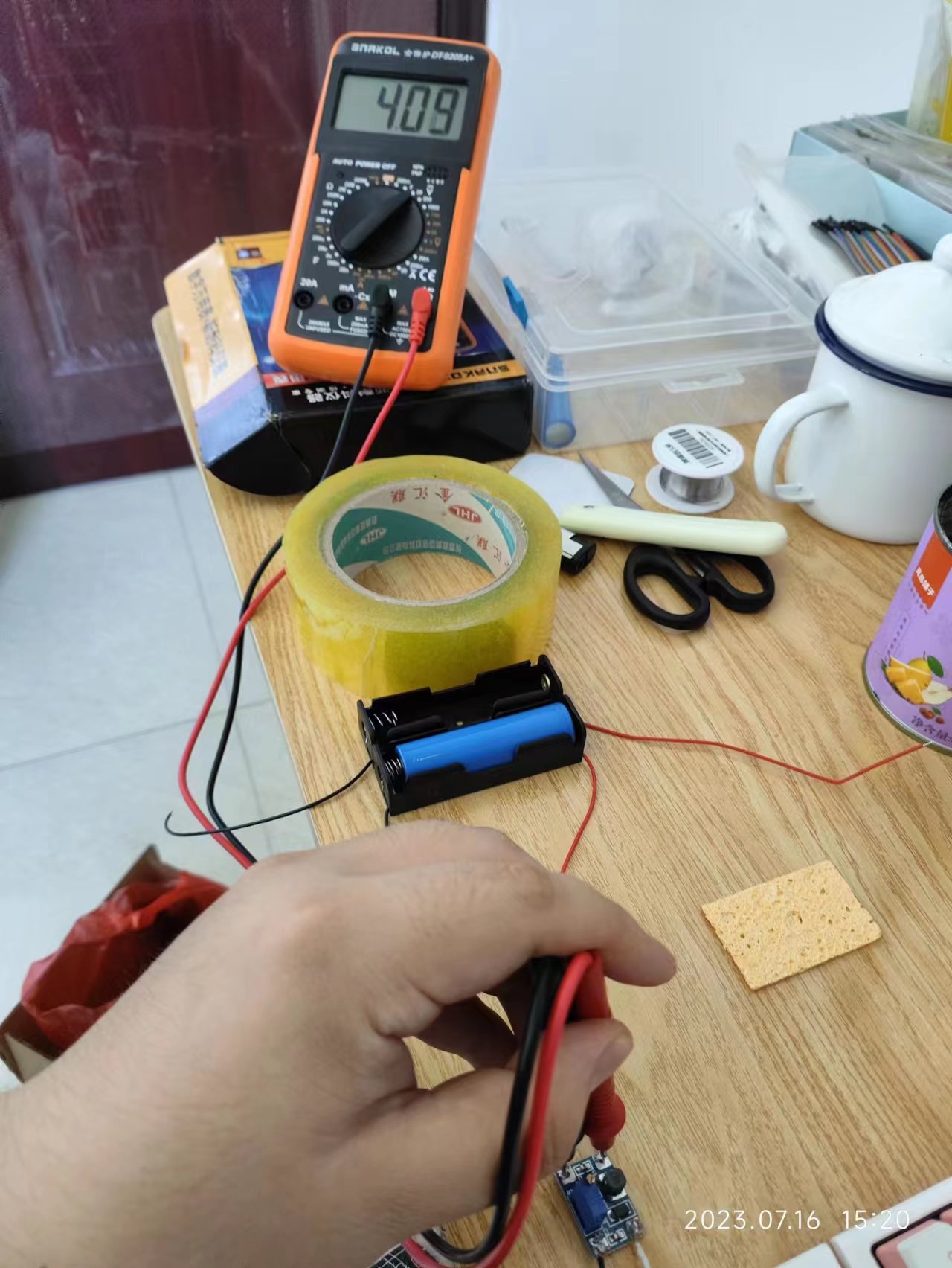
可以看到,我这个满电的18650是4.09V,一般来说在3.5~4.0V之间
然后注意接下来升压板的操作!
你可以量一下升压板输出端的电压,看是否比5V高,如果高,下面的操作可以自己酌情顺时针旋转
拔掉电池,让升压板不接电
然后升压板如上图所示的位置一样,将蓝色的调节电位器对准自己
使用一字螺丝刀逆时针将蓝色调节电位器上的调节旋钮进行旋转,旋转到底
旋转到底之后会有”咔哒“一声,当然也可能没有,大概旋转十几圈即可
此时放上电池,量一下输出端的电压,应该是要比5V大很多,可能在30V左右,注意自己的万用表量程
如果不是,可以拔下电池,继续逆时针旋转调节旋钮,比5V大即可
然后不用拔下电池,再使用一字螺丝刀,慢慢顺时针旋转旋钮,调节到5V即可:

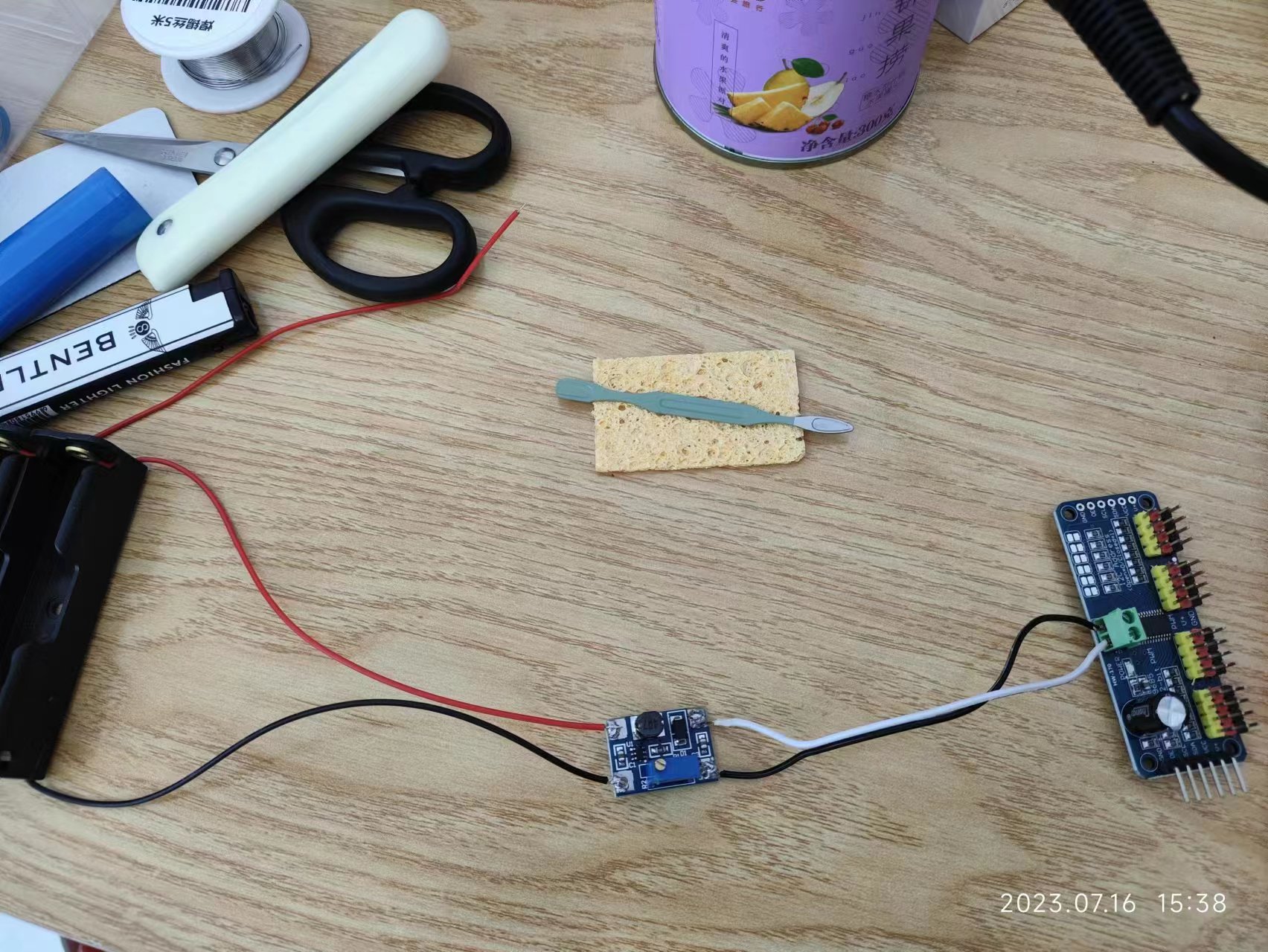
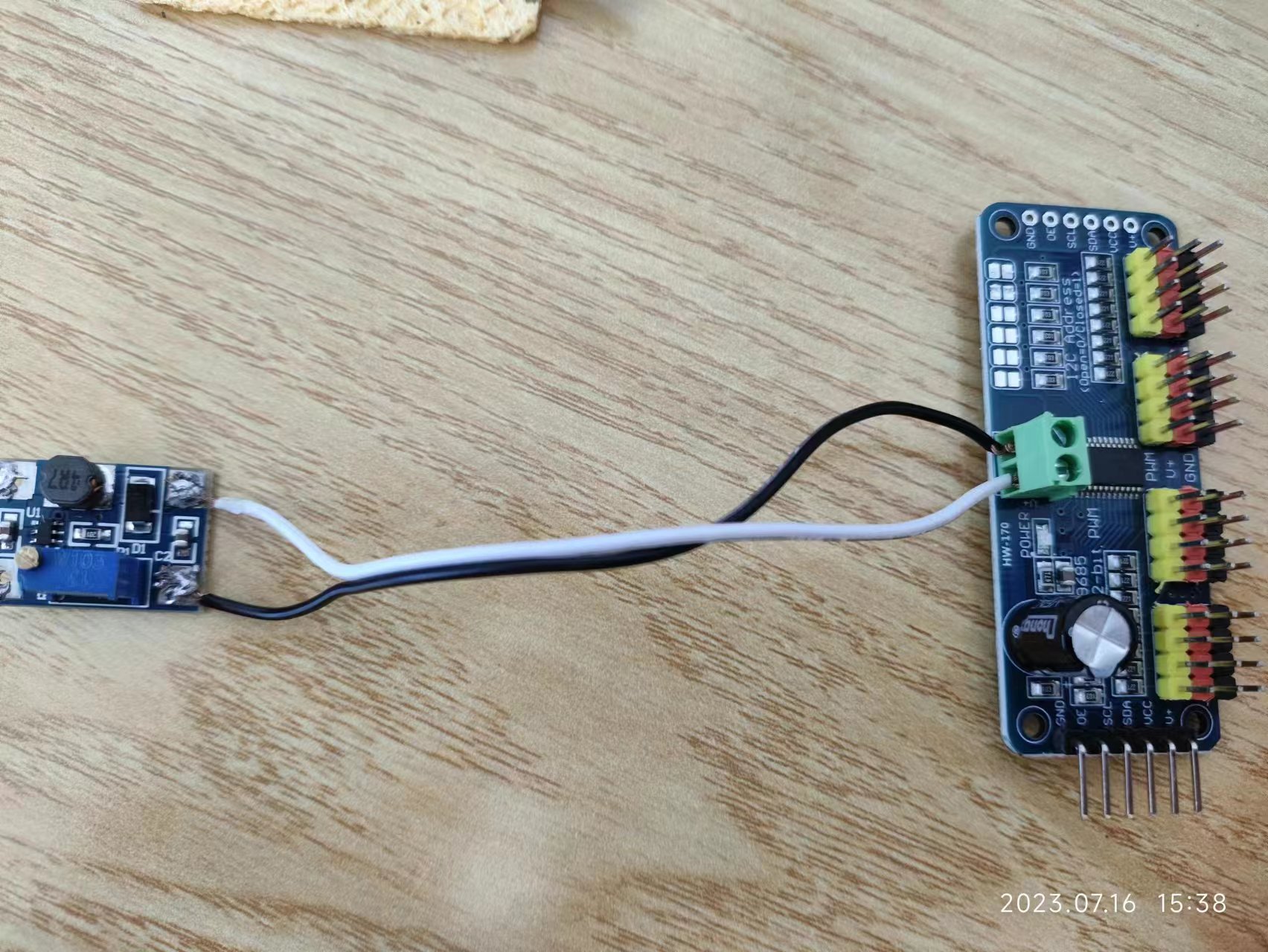
连接舵机驱动板:
注意电源正负极,螺丝拧紧即可
ESP8266连接
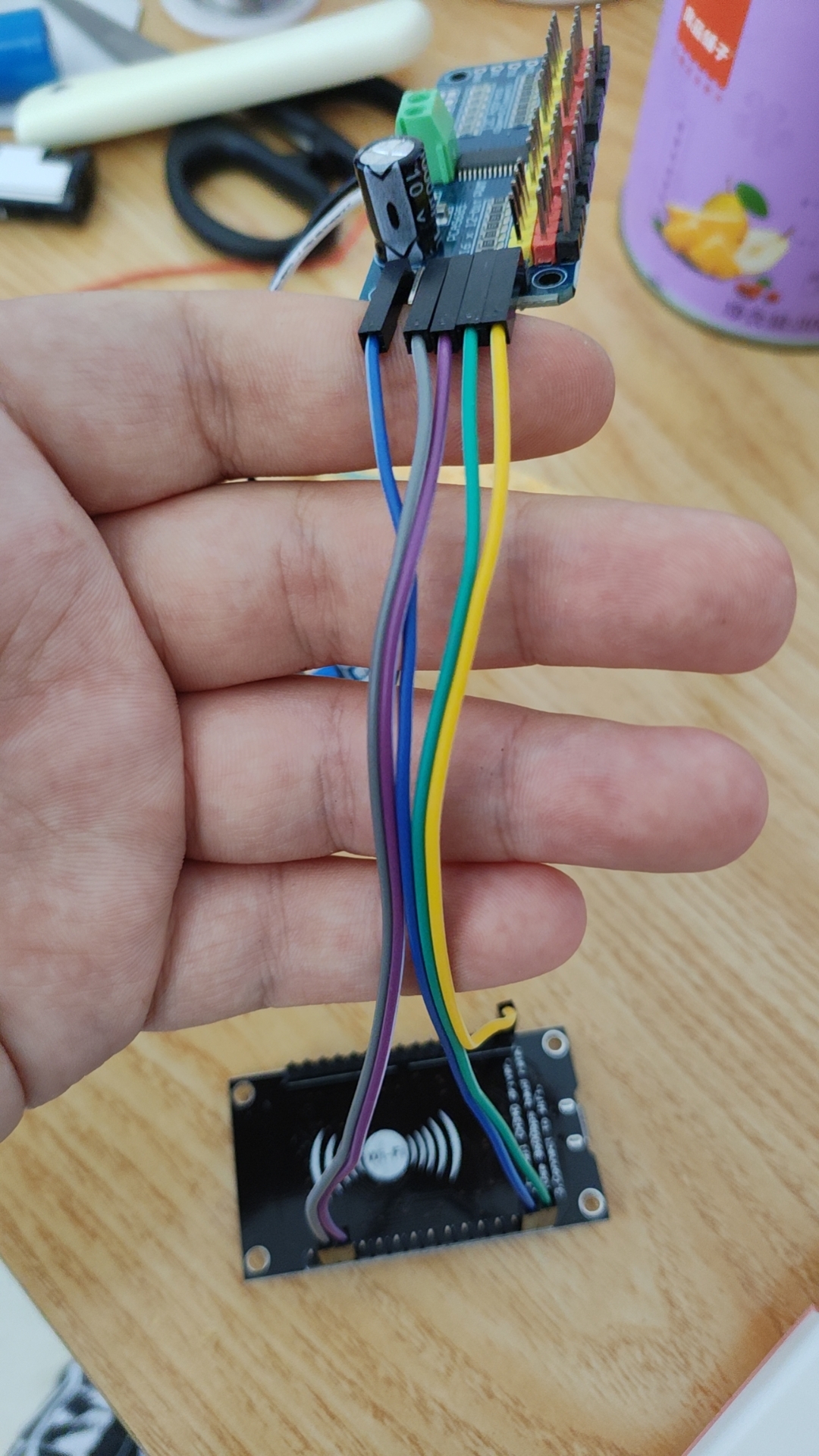
ESP8266通过i2c和舵机拓展板通信,使用杜邦线连接
ESP8266的供电由舵机拓展板提供,不需要再额外供电
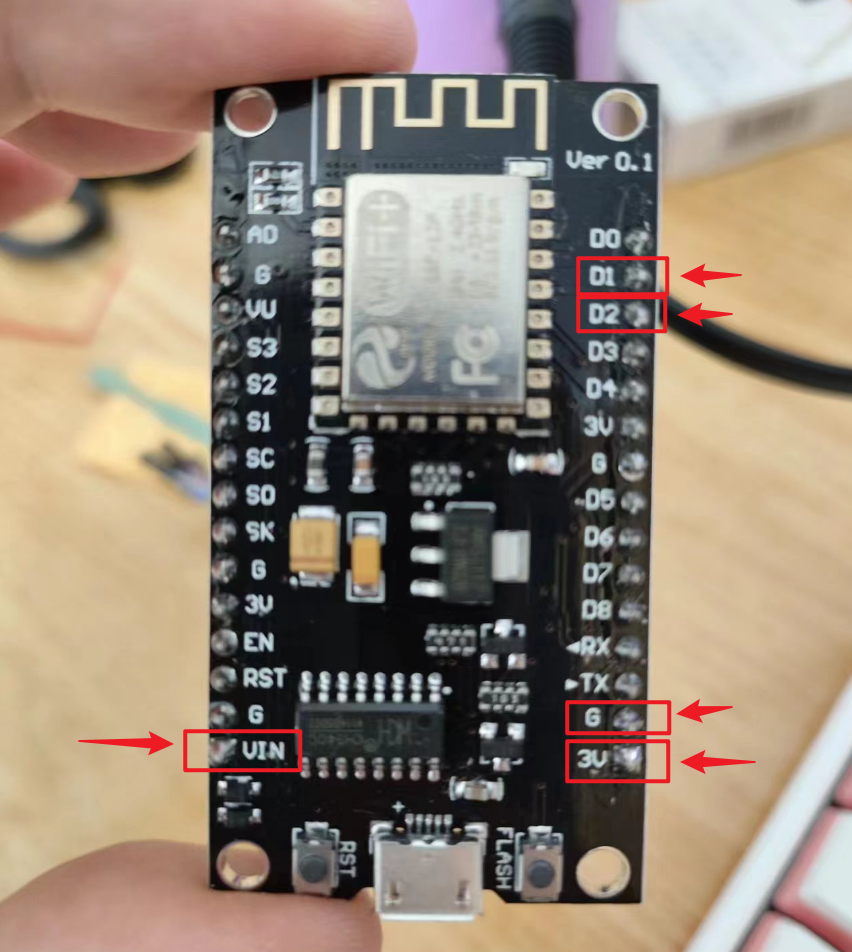
按照板子上的针脚注释,按照以下表格进行连接即可:
| ESP8266 | 舵机驱动板 |
|---|---|
| VIN | V+ |
| 3.3V | VCC |
| GND | GND |
| D2 | SDA |
| D1 | SCL |
ESP8266:
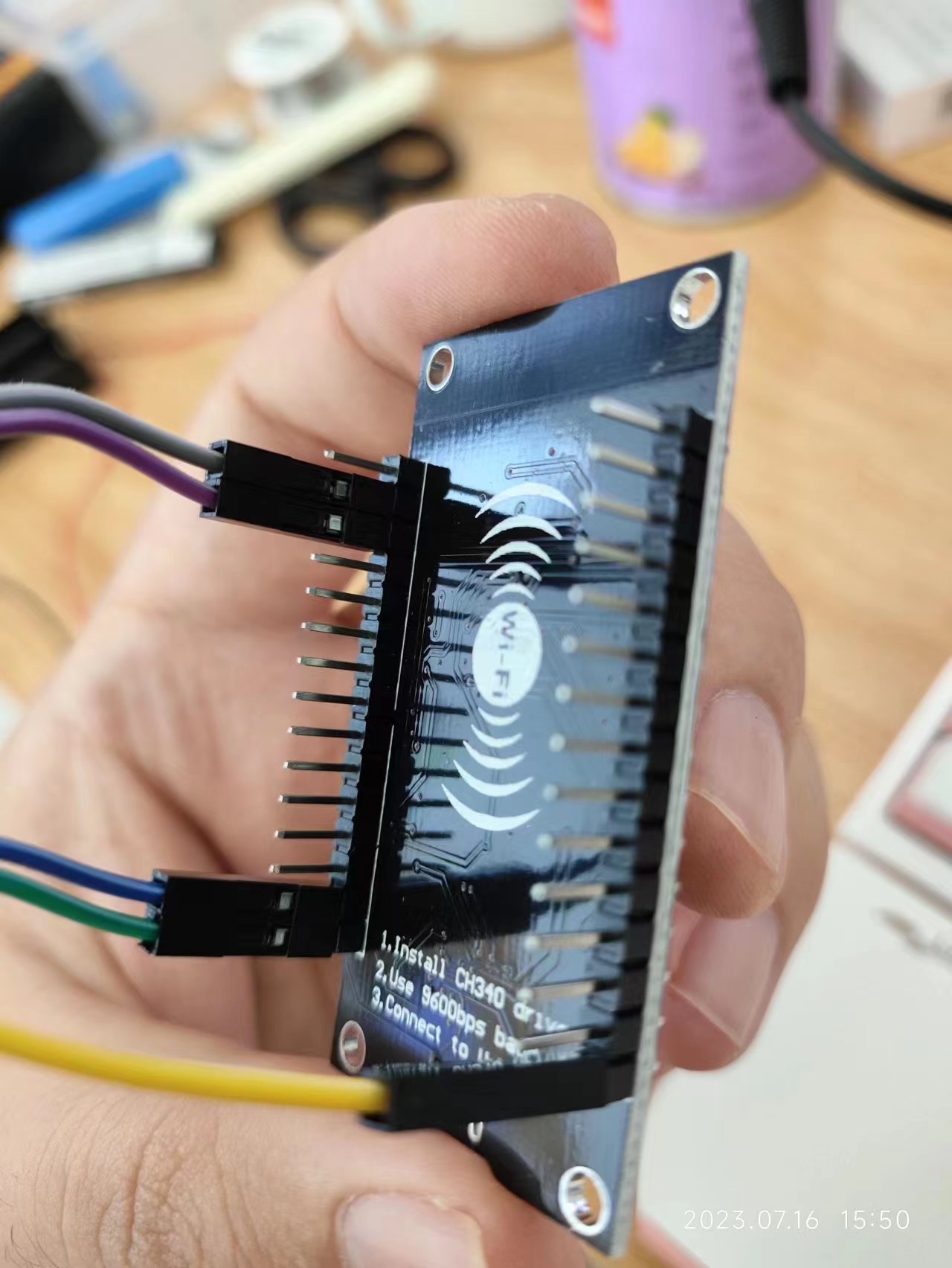
对应的背面:
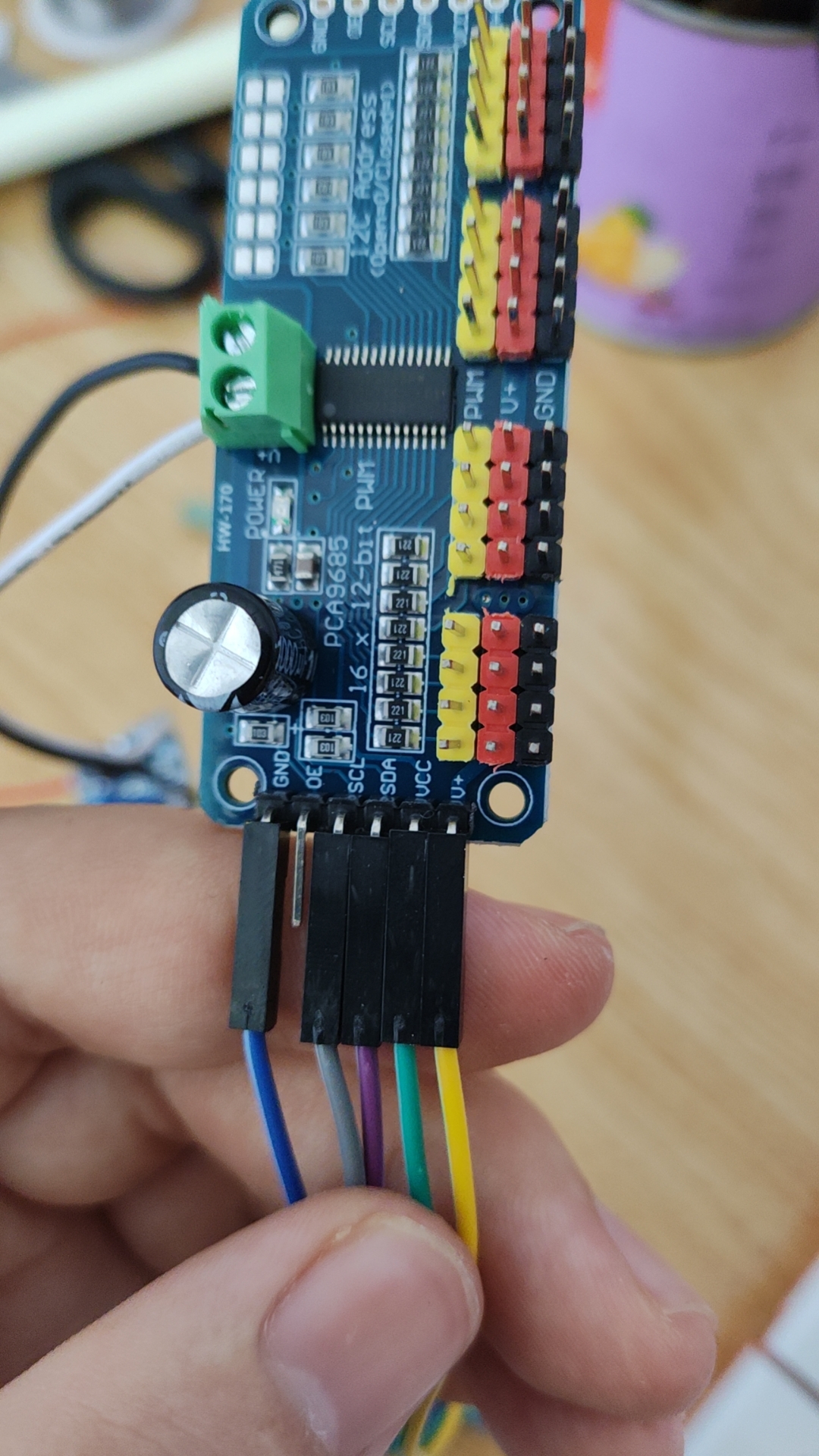
舵机驱动板:
安装舵机和3D打印件
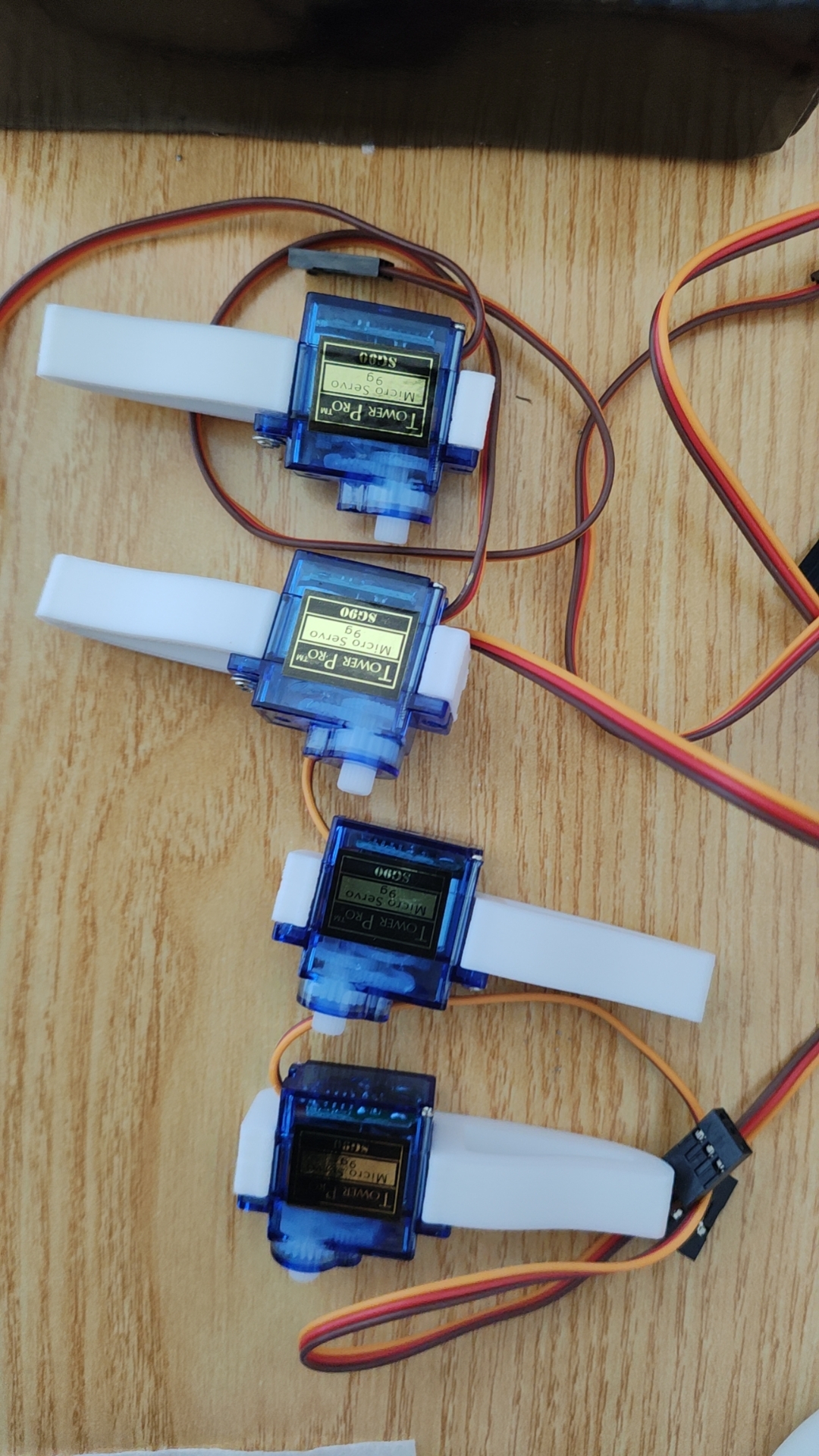
连接舵机和3D打印件之前务必调试一下自己的舵机,看看线路是否正常,舵机是否能正常驱动:检查方法就是找几个舵机,连接到驱动板上,按照舵机的颜色对应连接驱动板上的三根脚位,然后插上电池,连接网络,网页端随便点击一个动作,看看舵机是否会有对应的动作,如果有,说明电路方面没有问题,如果没有动作,可以从以下几个方面检测问题:
- 检测电池是否有电,使用万用表检测电池的电压是否正常
- 检测电池盒是否接触良好,电池插上之后检测输出的红黑线,是否有电压
- 检测升压板的输入输出是否正常,线路是否虚焊,尤其是升压板输出是否是5V
- 检测驱动板是否正常,正常工作驱动板应该是有亮灯
- 检测各个驱动板之间的杜邦线是否正常,连接是否稳固
- 检测开发板网络连接是否正常,与网页端是否正常通信
- 检测舵机是否损坏,开发板、升压板、驱动板是否坏板
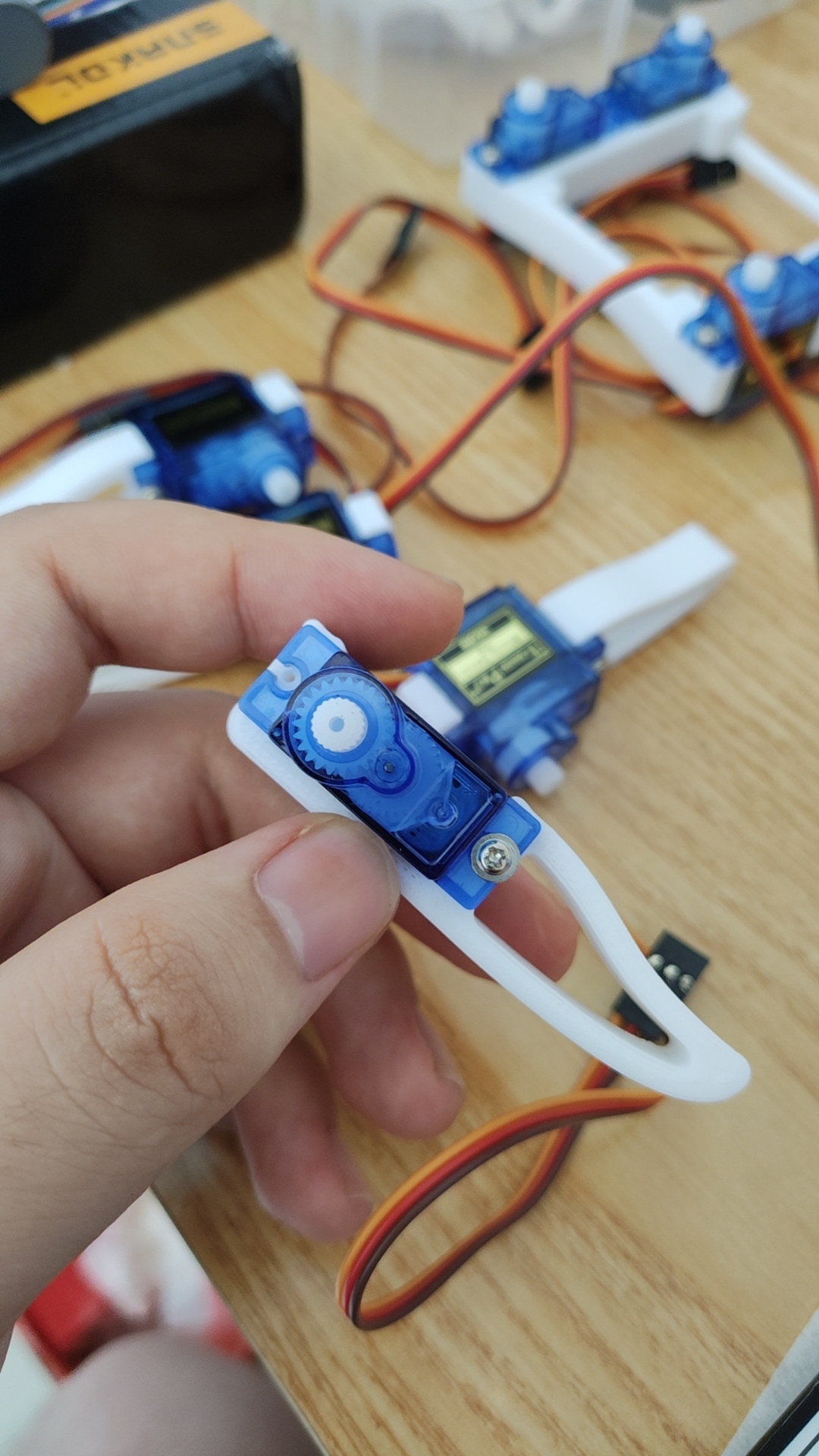
突然发现3D打印的大腿尺寸和买的舵机对不上,无法安装
请期待后续解决问题
我胡汉三又回来啦
经过一个周末的折腾,总算解决了3D打印尺寸的问题,现在继续拼装
把四个舵机安装到支架上, 注意线的方向全是向外,用舵机自带的螺丝安装
一共需要8个螺丝,这里只安装4个就够了,不然螺丝会不够用
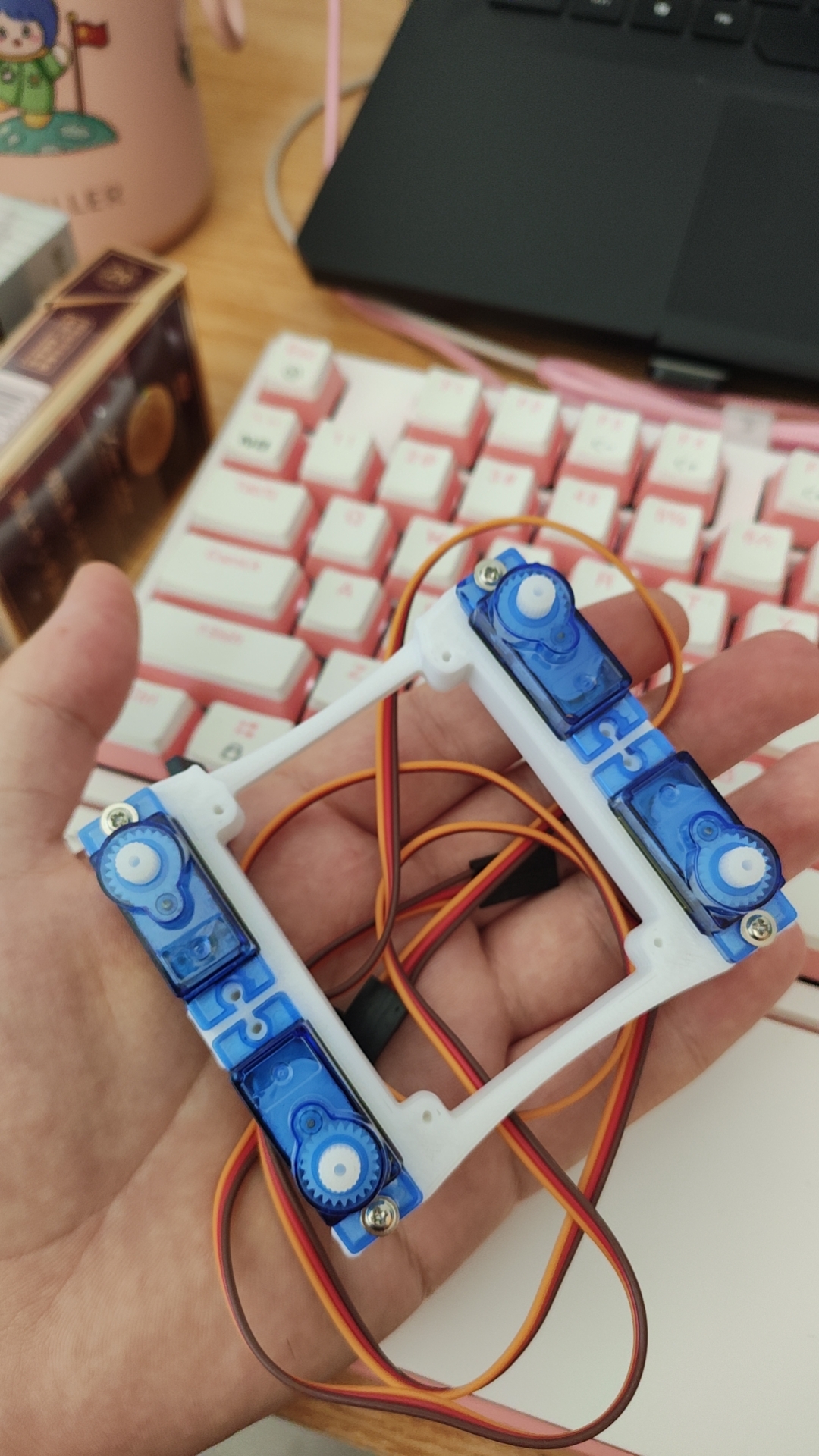
一定注意舵机的方向,不要搞反了!
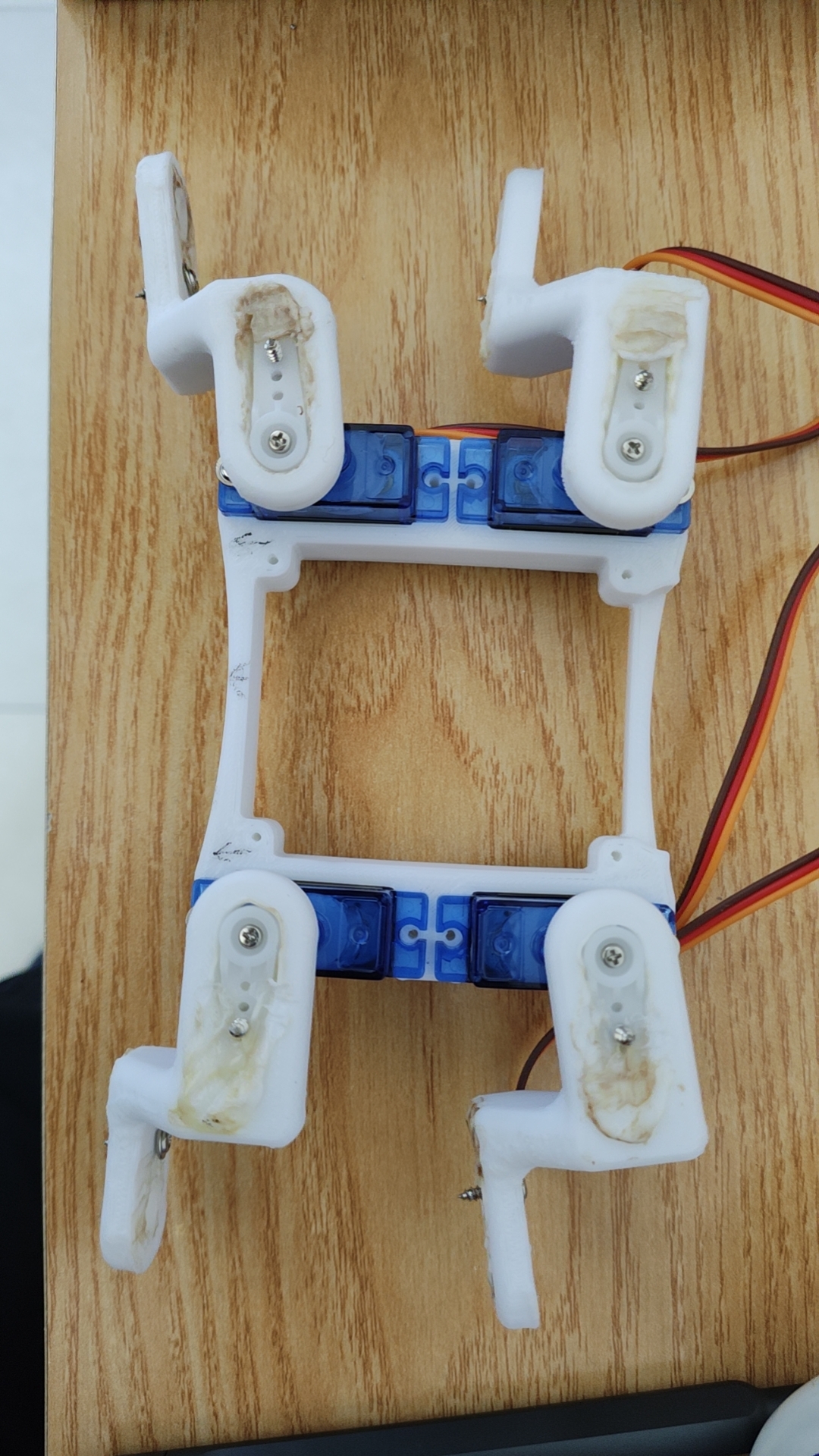
接下来安装四个小腿上的舵机,每个腿需要安装2个螺丝,这里只安装1个,不然螺丝不够用
注意四个小腿的舵机,是两个两个一组的,两组是不同的方向,一定要注意
如果四个腿是一个方向,那就说明打印错了,螺丝位置为支腿中间的螺丝位:
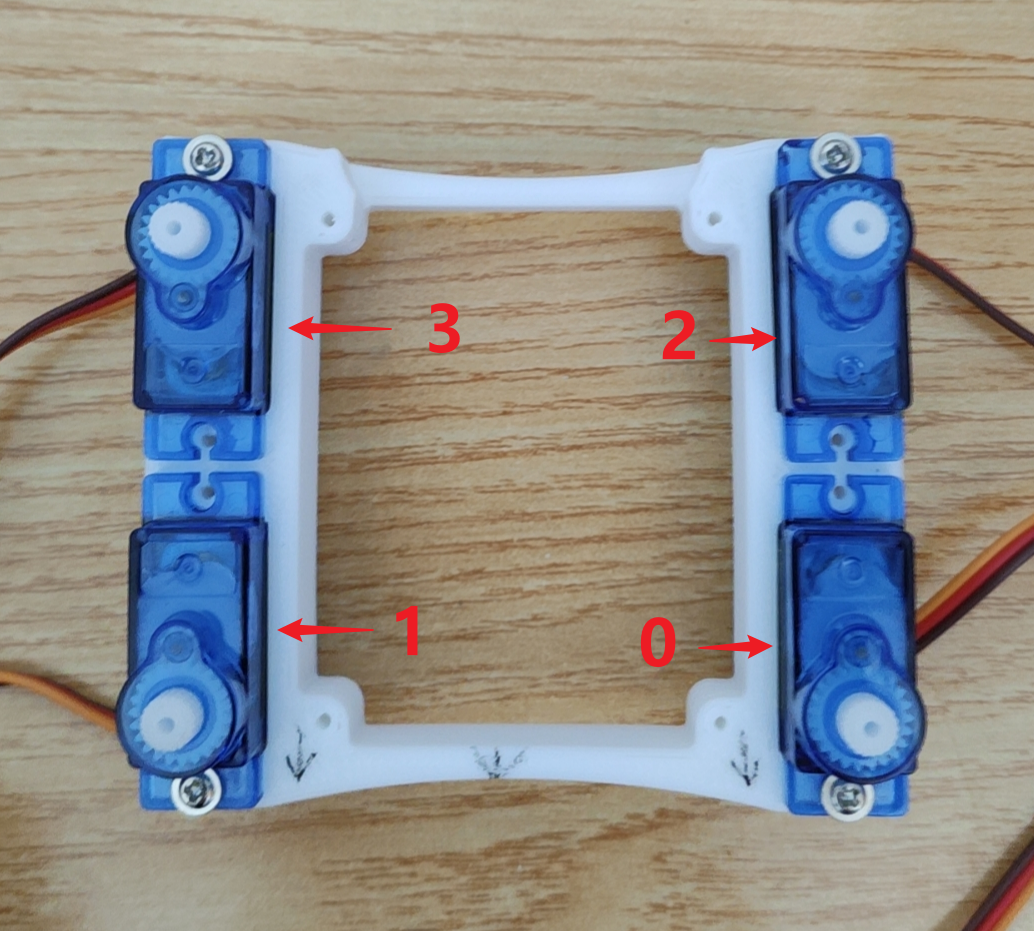
接下来连接舵机和驱动板,一定要按照下图所示,注意舵机的序号和顺序
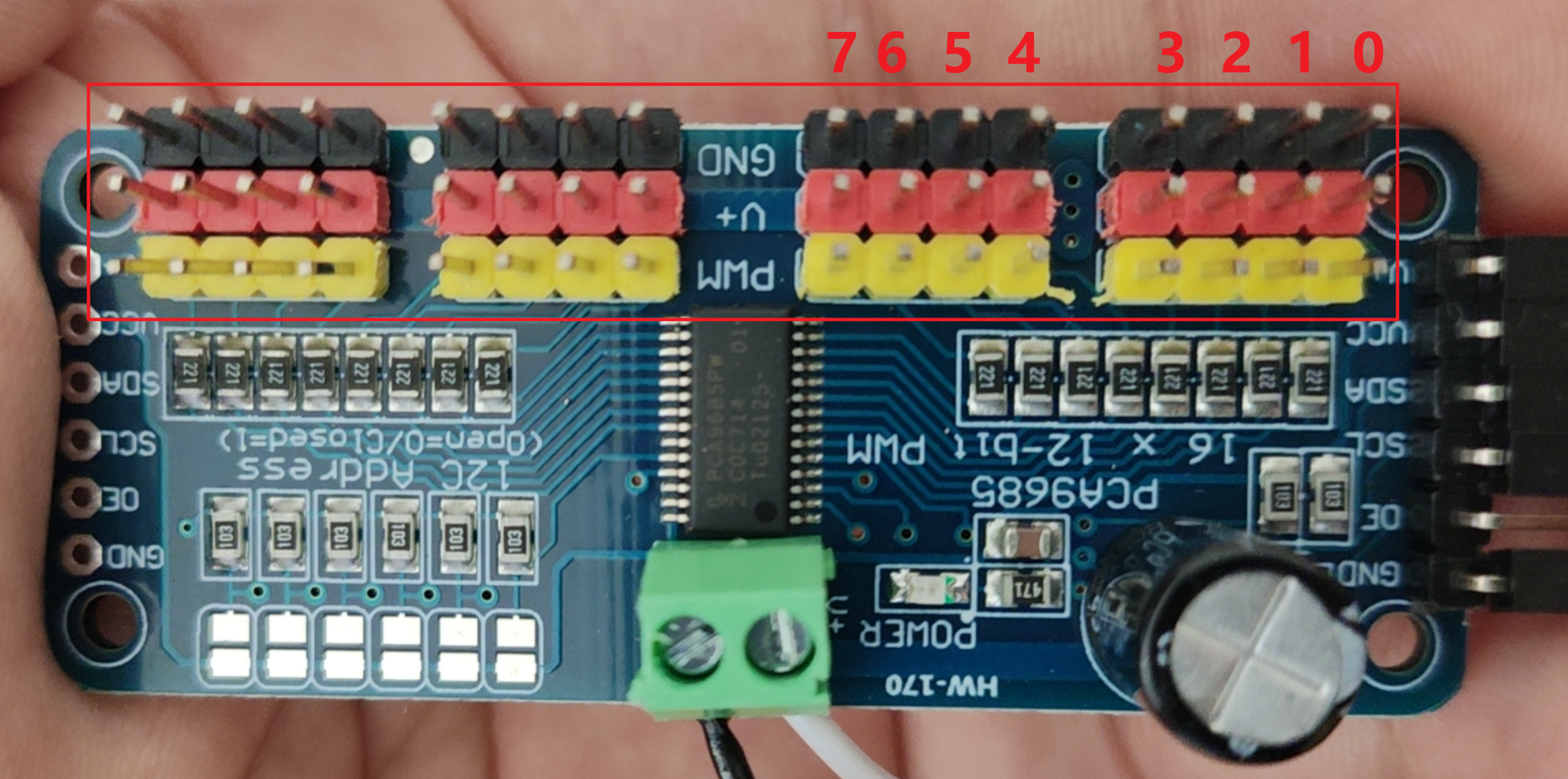
每个舵机三根线,按照对应颜色连接
首先是 0 、 1 、 2 、 3 号四个舵机:
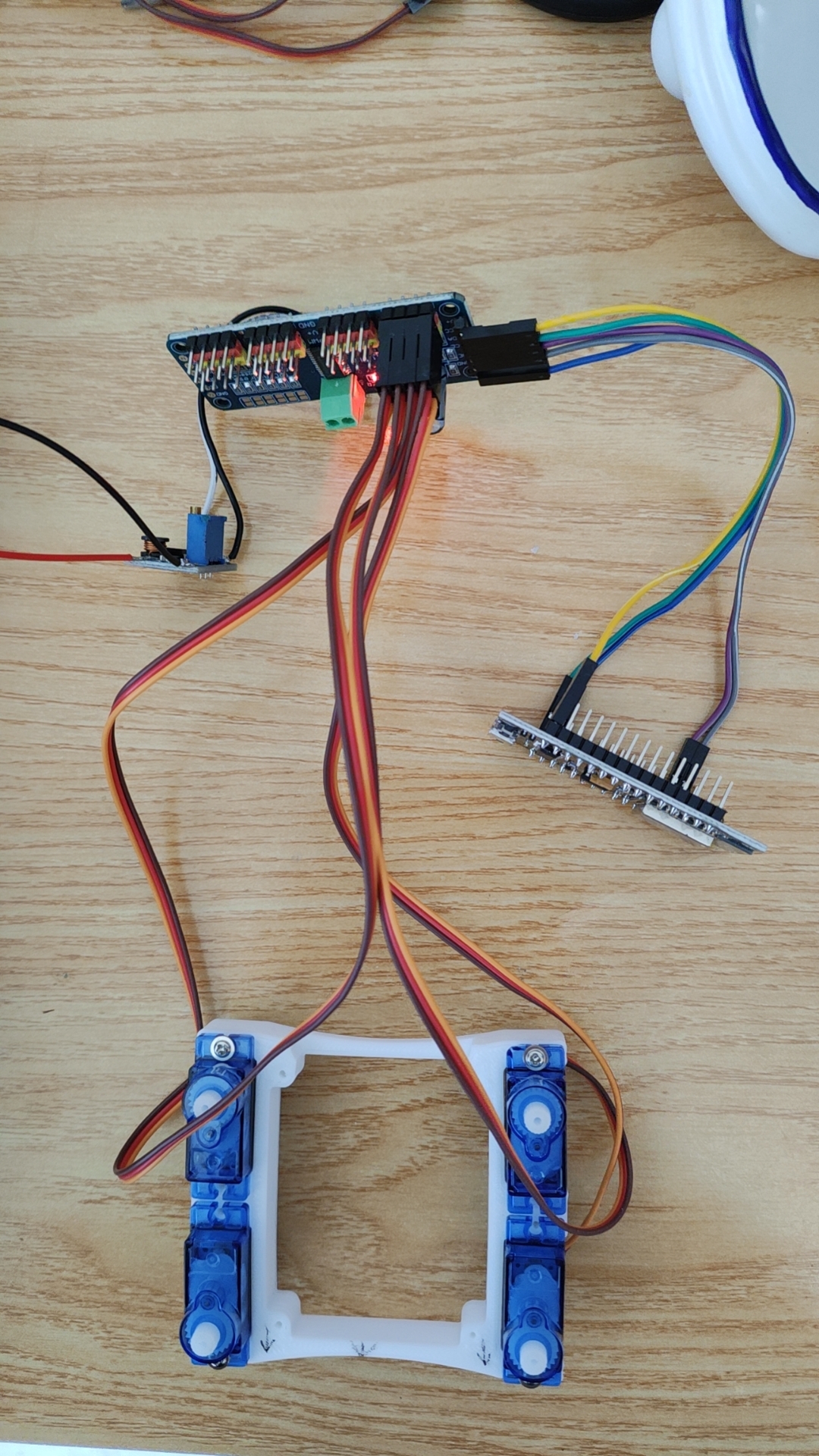
给板子插上电池,接好上述四个舵机:
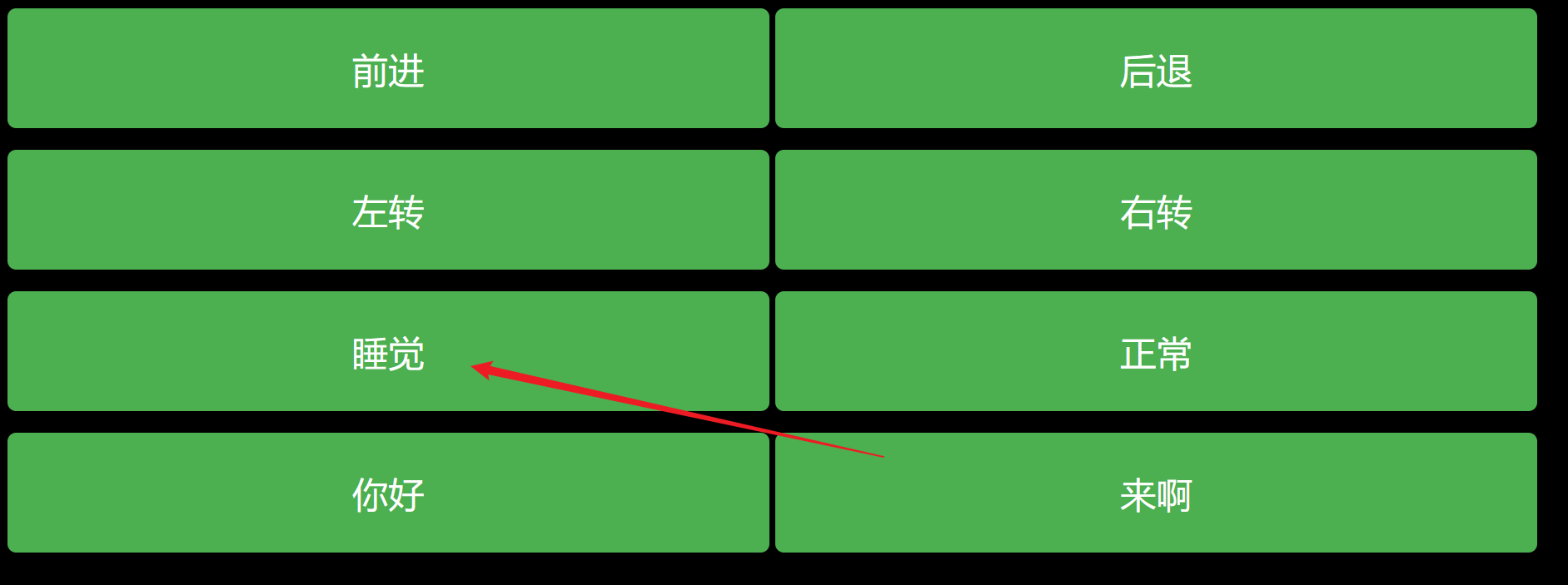
进入网页端操作界面,点击睡觉
等舵机动作后按照下图的摆放方式将4个腿安装上,并且用舵机自带的螺丝固定
安装过程中要保持通电,尽量按照90度直角安装,如果有倾斜也没关系,这是因为舵机齿轮精度以及安装精度不够,后期可以通过调整代码修正


在四个大腿上安装好固定舵机的方向角,每个大腿两个一对
忽略我用电烙铁手动扩建了尺寸槽,简单粗暴
点击睡觉之后,等待舵机动作完成
然后安装四个大腿:(尽量按照平行的方向安装,大腿有相对长和短的两节,长的一节安装到躯体上)
将剩下的 4 、 5 、 6 、 7 号舵机连接驱动板:(断电连接!)
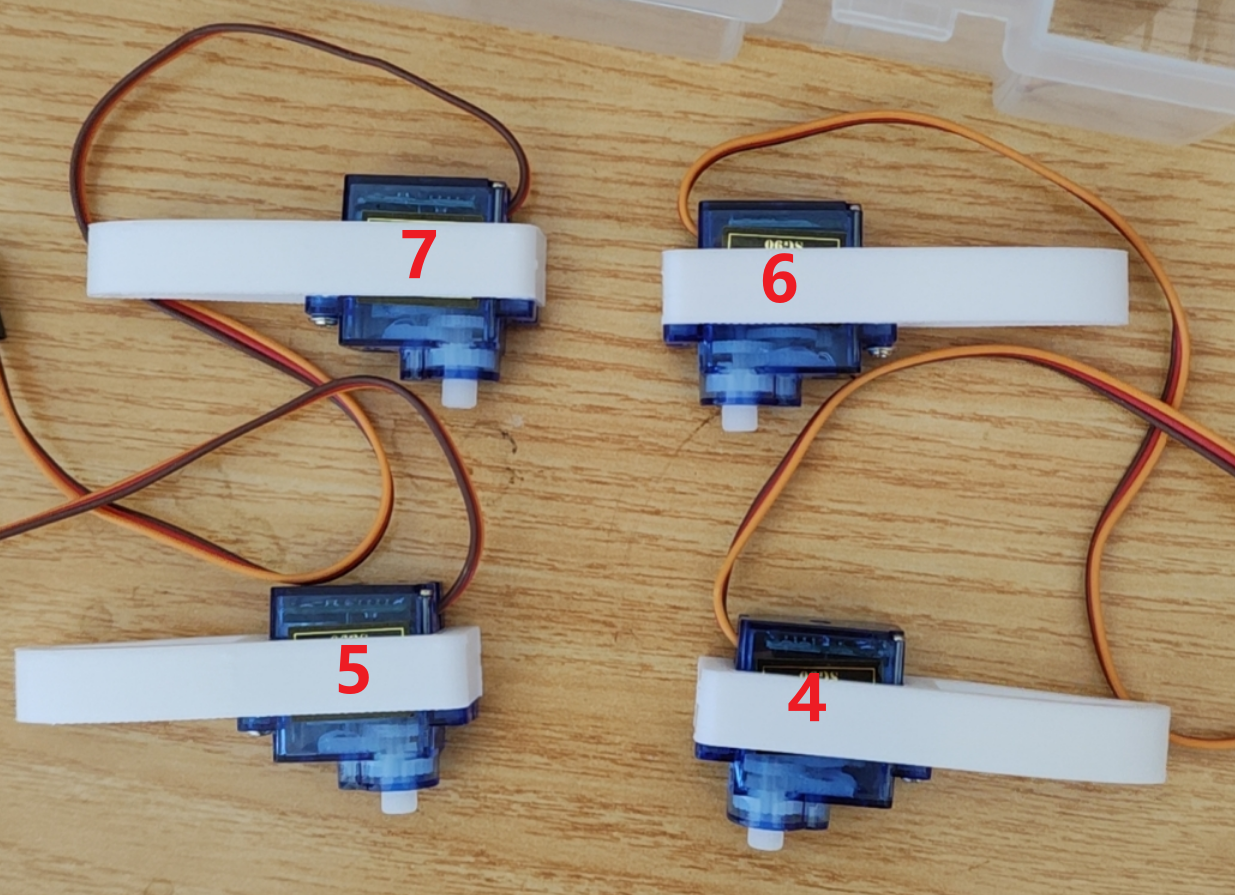
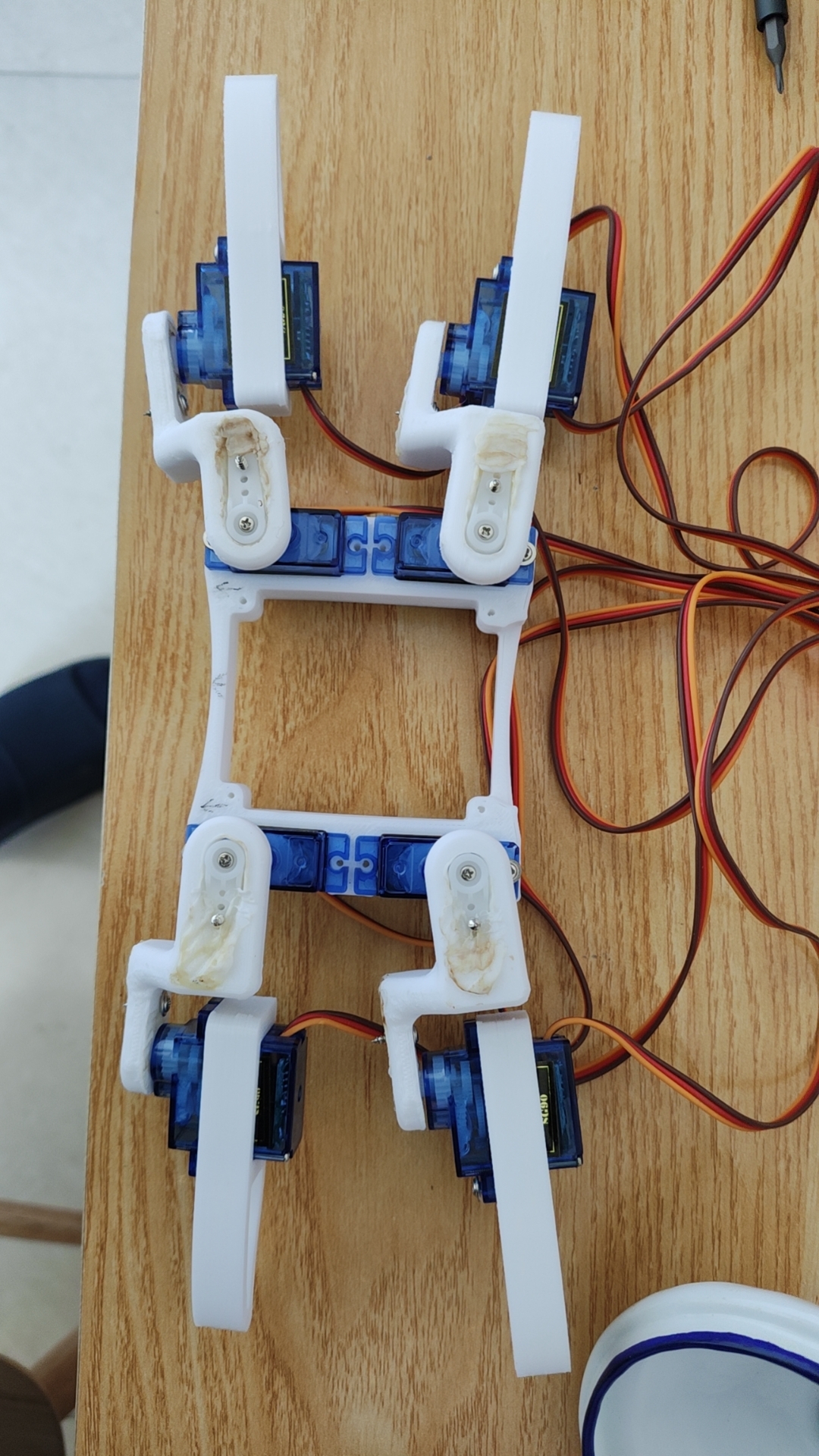
和驱动板连接好后,上电,在网页端点击睡觉,等待舵机动作完毕之后,进行四个小腿的安装:(一样,安装的时候尽量平行安装)
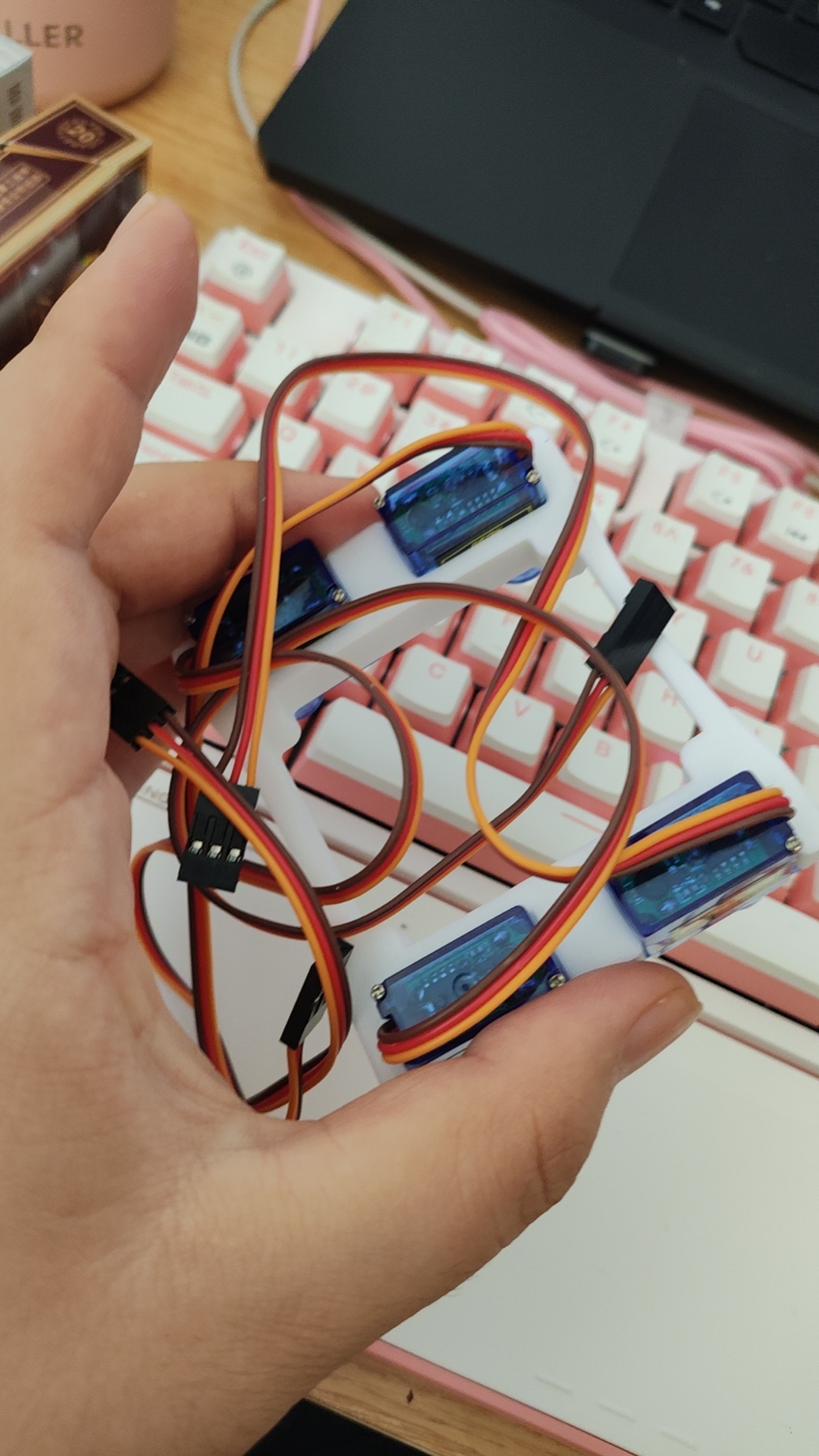
整理线束
可以用小轧带进行固定,方便又快捷
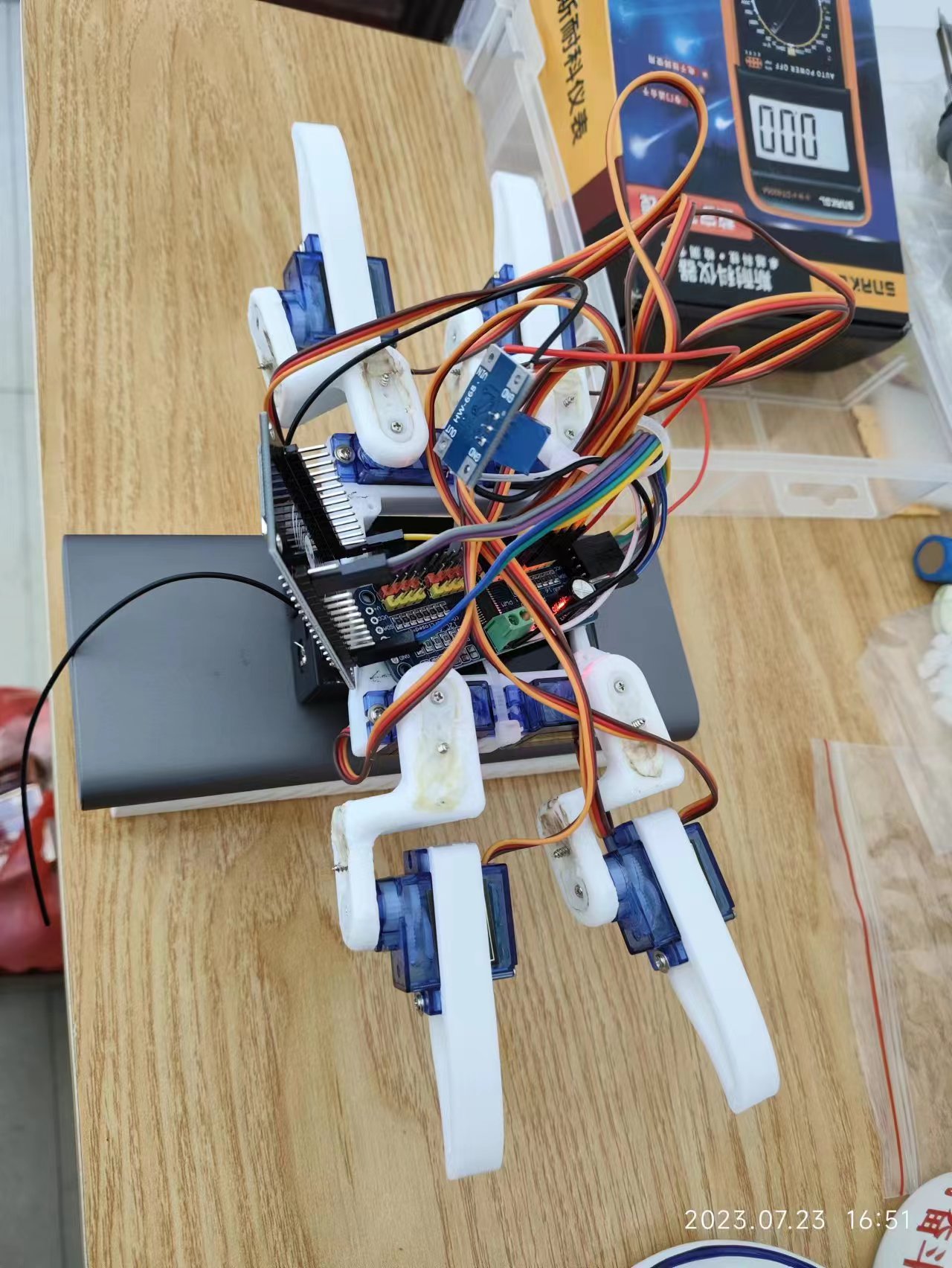
我的差不多就这样了,线束懒得整理了,有三个舵机应该是安装有问题,无法动作,但是左边的两条腿是完全正常的,后续再优化以下程序
那么,四足机器人就先到这里了~